「追加予定兵器原理その1」の編集履歴(バックアップ)一覧に戻る
追加予定兵器原理その1 - (2009/06/19 (金) 15:02:40) の編集履歴(バックアップ)
このシリーズ、ロボット用装備の原理について考察する。
リアルから、SFトンデモ原理設定、独自世界観まで何でも混在している。
アイディア製作者 堀江 伸一
住所 兵庫県加古川市加古川町南備後79-16
巨大ロボ用無反動砲考察。
- 分類 子供が大喜びするびっくりギミック 一発ネタ 人の乗り込む巨大ロボット アニメ向き
ロボット用無反動砲その1
アニメや漫画などに出てくる巨大人型ロボット達。
彼らは支援用として強力な放火を搭載しているロボが多いが、一般的に言って強力な砲を搭載するほど、発射時の衝撃がでかくなり安定して発射することが困難になる。
実機でいえば、何十トンもある戦車などが、砲の反動で後ろに下がるのなどはその典型的な例である。
戦車ほど重たいものでも砲の衝撃を吸収するのは困難なのである。
戦車より不安定なロボにおいてはますます困難である。
そのため、砲撃用ロボは必然的に大きく重く描かれる。
今回は、その砲の反動を軽減するシステムについて掲載する。
このシステムにより砲撃用ロボ以外の肩にも強力な放火を搭載できることとなる.
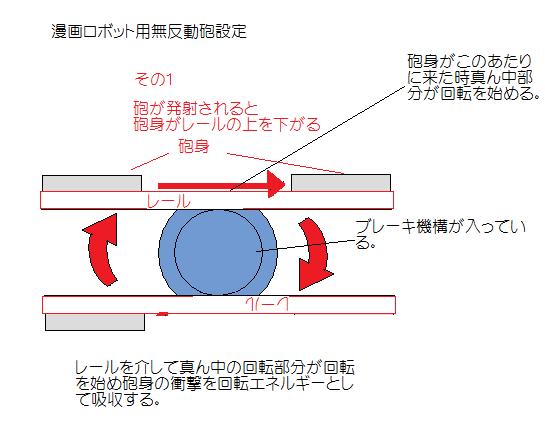
このシステムは、砲の反動を回転エネルギーとして吸収する。
レールは砲発射時の弾道の安定性を確保するためのものである。
砲発射、弾が出るまでの一瞬の間だけ砲の向きを保つ役割を果たす。
説明のために少し長く表現しているが実際は短い。
砲身がレールの上で後ろに下がりきると、残った砲の衝撃は真ん中の回転ユニットの回転に変換され衝撃が吸収される。
火薬の威力があがり、砲がよりコンパクトに作れるようになった時代においてもこの砲は重要である。
主な使用例
アーマードコアにおけるWeaponArmの一種として。
強力な弾が撃てる半面、発射後腕武器が3周ほどくるくる回る。
回転機構が肩にある場合。
砲発射後、砲が肩の上とわきの下で回転する。
人型ロボの背中装備。
多脚戦車の背中装備など。
背中の曲線にあわせてレールが存在し、そのレールの上に砲が存在する。
砲はレールの上を滑って衝撃を吸収する。
レールは曲線を描いている。
現在図準備中。
ロボット用無反動砲その2
その1と原理は同じだが、コンパクトさとステルス性を重視した無反動砲である。
主砲となるキャノンは独立ユニットとなっている。
ステルス装甲のカバーで覆われており高いステルス性を誇る。
主砲冷却、消音、熱センサー、レーダー対策のしっかりしたカバーである。
主砲模式図中、隣にある弾薬庫等は省略した。
#ref error :画像を取得できませんでした。しばらく時間を置いてから再度お試しください。
砲の左右をステルス装甲板で多いカバー内部はアステロイド曲線を採用している。
この曲線の上を砲が動くことで各種センサーの中で目立つ砲身がカバーの外に出ないようになりステルスに貢献する。
砲がアステロイド曲線の上で動くがこれは衝撃吸収機構にもなっている。
砲身の衝撃が回転エネルギーに近い形で吸収されるわけである。
砲はロボット用無反動砲その1で取り上げたのと同じレールの上に乗っており発射後の安定性を保つ。

