状況
プログラム上では同じ回転数でタイヤを回しているが、走行体は直線的に走らず曲がってしまうとき。
問題
ETロボコンの難所には、ライントレースできない部分が存在する。
しかし、走行体が曲がってしまっては、期待通りの動きをすることはできない。
特に直線的な動きが要求される場面が多いので、できれば直線的な動きは常に実現させたい。
フォース
- モータの回転数のログを取れる
- 光センサーを用いない
解決策
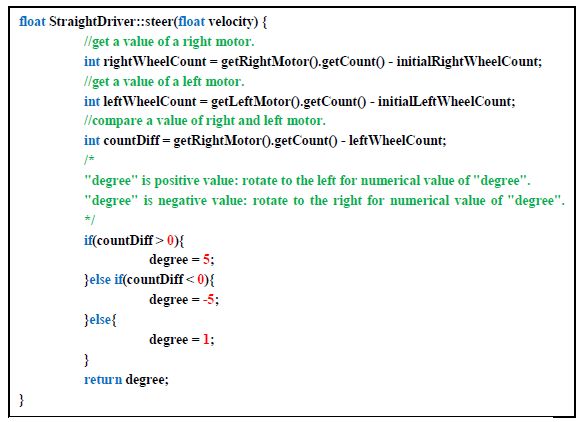
モータの差は必ず生じるもので、左右の車輪がプログラム通り同時回転数になることは少ない。
そのため、ログを取りプログラム上で補正をかけることで左右のバランスをとることができる。
参考のプログラムを簡単に以下に示す。
もしくは、初めから
モータの性能差が少ないモータを選別することが重要である。
関連するパターン
直線走行を実装することで、2011年度の大会では「ET相撲」の押し出し可能性を高めることが出来た。
また、ルックアップゲート手前のマーカーをうまく検知できなかった際も
灰色無視走行を実装することが可能となる。
最終更新:2013年08月16日 15:14
