文部科学省認定 ディジタル技術検定2級制御部門解説
【はじめのページへ戻る】
-
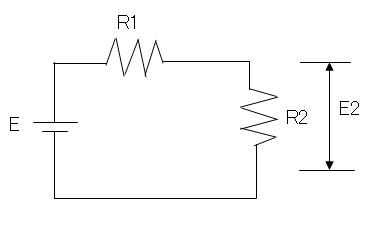
(1)図の回路で、R2=18ΩのときE2=6V,R2=45ΩのときE2=9Vであった。電源電圧Eはいくらか
【1】
①10V ②13.5V ③15V ④16.5V ⑤18V
正解 ②
【解説】
R2=18ΩのときE2=6V,R2=45ΩのときE2=9Vなので
E=6+R1×1/3
E=9+R1×9/45
が成り立ちます。
したがって、R1=22.5Ωなので電源電圧E=13.5Vです。
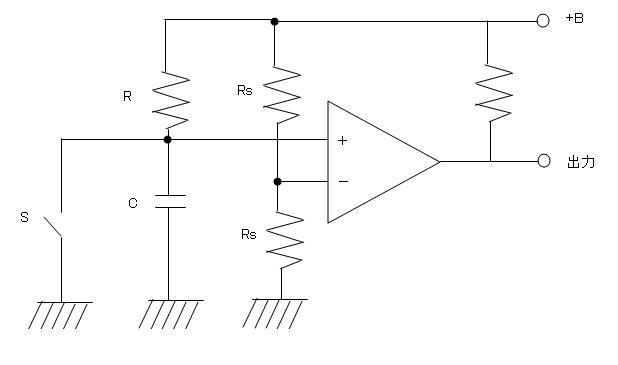
(2)入力インピーダンスが十分高く、利得の十分大きな単一電源用比較器を用いて図のような
タイマを構成した。スイッチSを閉じた状態から開くと、開いた瞬間から電圧比較器の出力が
B[V]となるまでの時間は、およそ次のどの式で示せるか。【2】
①0.36RC ②0.5RC ③0.632RC ④0.7RC ⑤RC
正解 ④
【解説】
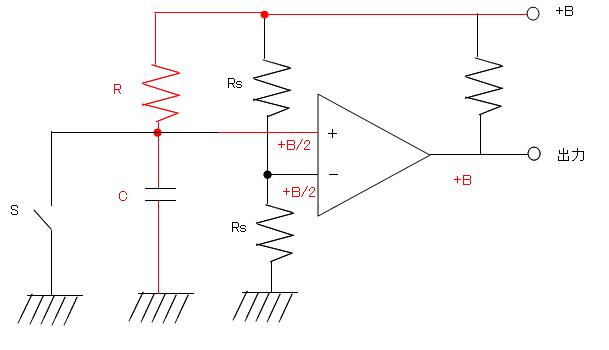
スイッチSがOFFになると、帰還のかかった系が出来上がる。利得が大きいので
イマジナリーショートがおき、オペアンプの-入力端子の電位はB/2、+入力端子がB/2となったとき
出力は+Bとなる。ところが、赤い線で書かれた部分は積分回路が形成されており、スイッチをOFF
にしてある程度時間がたたないと、+入力端子の電位はB/2とならない。
スイッチSをOFFにしたときから、+入力端子がB/2となるまでの時間をTとすると
B(1-exp(-t/RC))=B/2が成立する。
したがって T=(log2)RCより、T=0.7RCとなる。
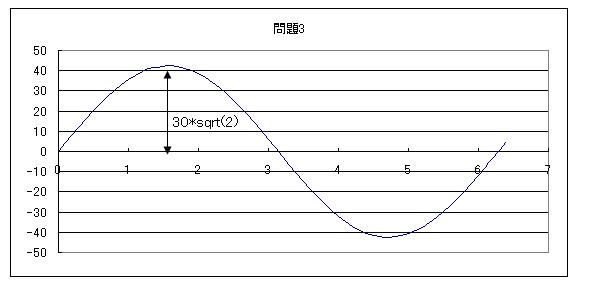
(3)実効値30mVの正弦波を16ビットに直線量子化したとき、量子化レベルの最小値(分解能)は、
およそ何ボルトになるか?【3】
①0.46μV ②0.65μV ③0.92μV ④1.29μV ⑤1.88mV
正解 ④
【解説】
実効値が30mVであるため、この正弦波はピーク時が30*sqrt(2)=42.4mVの正弦波となる。
負電圧も考慮して84.8mVを2^16で均等に分割(線形量子化)するわけです。
したがって84.8mV/2^16=1.29μVです。
(4)次の中で、D-A変換器の方式として使われているものを、二つあげよ。【4】
(ア)並列型 (イ)追従比較型 (ウ)2進重み抵抗型
(エ)二重積分型 (オ)R-2Rはしご型
①(ア)と(ウ) ②(ア)と(エ) ③(ア)と(オ) ④(イ)と(ウ) ⑤(イ)と(オ)
⑥(ウ)と(エ) ⑦(ウ)と(オ) ⑦(エ)と(オ)
正解 ⑦
【解説】
DA変換で使用されているものは(ウ)2進重み抵抗型(オ)R-2Rはしご型
でそれ以外はすべてAD変換で使用されているもの。
(5)次の(ア)~(オ)の式の中には、論理式
Z=(
A+B+C)・(
A+
B+C)・(
A+B+
C)・(A+B+C)
の右辺と
等価でないものが二つある。どれとどれか。【5】
(ア)A・B・C+A・B・C+A・B・C+A・B・C
(イ)A・B+A・C+B・C
(ウ)A・B+A・C
(エ)(A+C)・(A+B)・(B+C)
(オ)(A+C)・(A+B)
①(ア)と(イ) ②(ア)と(エ) ③(ア)と(オ) ④(イ)と(ウ) ⑤(イ)と(エ)
⑥(ウ)と(エ) ⑦(ウ)と(オ)
正解 ⑤
【解説】
公式 A・A=0 A(1+X)=A A・A=Aを用いると
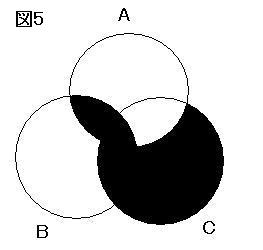
Z=(A+B+C)・(A+B+C)・(A+B+C)・(A+B+C)
=(A+C+CB+BA となります。
(ベン図を描いてみてください。図5参照)
公式 A・A=0 A(1+X)=A A・A=Aを用いながら(ア)~(オ)を変形すると
(ア)A・B+AC
(エ)A・B+C・B
(オ)A・B+C・A+C・B
ベン図を描いてみてください。
したがってZを実現していないものは(イ)と(エ)です。
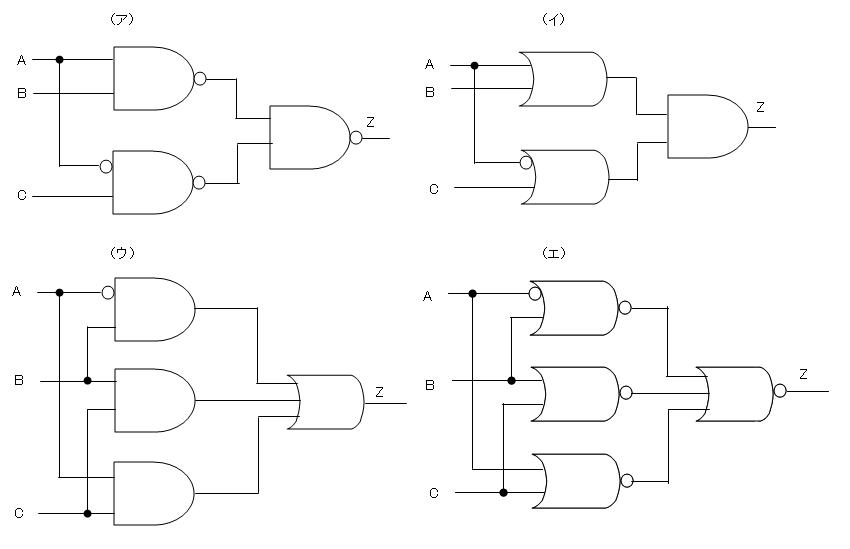
(6)次の論理回路(ア)~(エ)の中には、問題(5)の論理式を実現して
いないものが二つある。どれとどれか。【6】
①(ア)と(イ) ②(ア)と(ウ) ③(ア)と(エ) ④(イ)と(ウ) ⑤(イ)と(エ)
⑥(ウ)と(エ)
正解 ④
【解説】
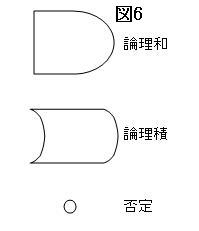
記号の意味は図6を見てください。
公式ド・モアブルの公式
AB=A+B
A+B=AB を使ってください。
(ア)=AB+AC
(イ)=AC+BA+BC
(ウ)=AC+BA+BC
(エ)=(A+B)(B+C)(C+A)
途中計算は省略します。
問題(5)のZを実現していないものは(イ)と(ウ)
(7)JKフリップフロップを用いた図のカウンタは、次のどのカウンタか。ただしCはクロック
入力端子であり、1は電源電圧値に等しいとする。【7】
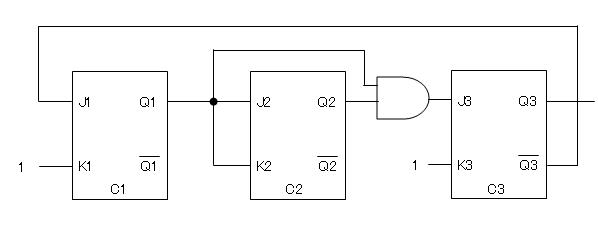
①4進カウンタ ②5進カウンタ ③6進カウンタ ④7進カウンタ ⑤8進カウンタ
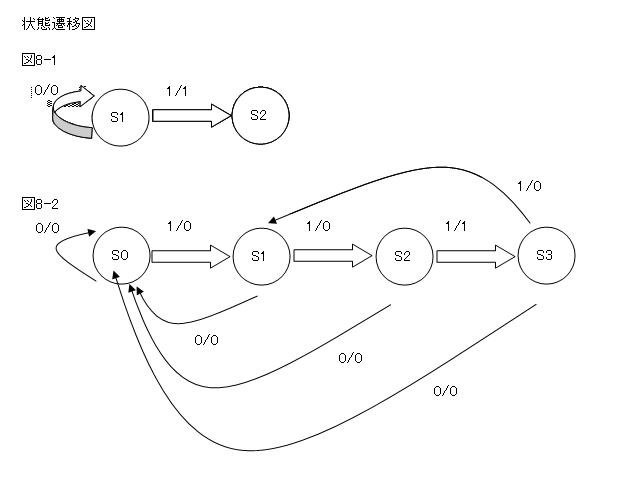
(8)一つの入力から直列に入力されるビット系列に対し、1が三つ続くと出力に1を一つ出力する順序回路がある。
この順序回路の状態数は四つあるから、それぞれをS0,S1,S2,S3としたとき、次の状態遷移図を完成させよ。
ただし、初期状態はS0であるとする。

【8】 正解 ①
【9】 正解 ④
【10】正解 ②
【解説】
図8-1は状態遷移図の説明です。
意味は
☆状態S1で0を入力→0を出力し状態は変わらず
☆状態S1で1を入力→1を出力し状態はS2に遷移
問題のシステムを状態遷移図にあらわすと図8-2のようになります。
[ポイント]
☆1を連続3回入力ではじめて1を出力
☆1を3回入力するまえに0が入るとはじめからやり直し(S0に状態が遷移する)
☆1を3回入力した直後に1が入力された場合は状態がS1に遷移する。
(9)伝達関数の特性評価に用いる単位ステップ関数x(t)の定義とその図表示として正しいのは、次のうちのどれか。【11】
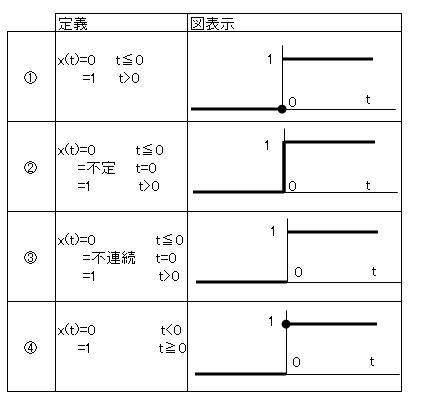
正解 ①
【解説】
とくになし
(10)図のブロック線図において、入力をR1(S)出力をC2(S)としたときの伝達関数W(S)は、次のうちのどれか。
ただし選択肢の式では、Gx(S)をGxであらわしている。【12】
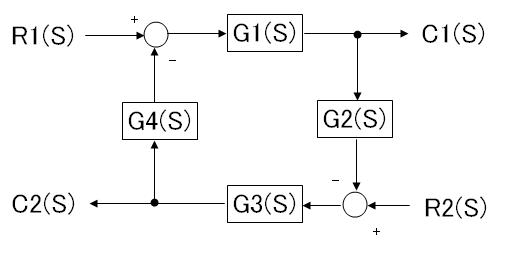
①W(S)=G1/(1-G1G2G3G4) ②W(S)=G1/(1+G1G2G3G4)
③W(S)=G1G2G3/(1+G1G2G3G4) ④W(S)=-G1G2G3/(1-G1G2G3G4)
正解 ④
【解説】
図10
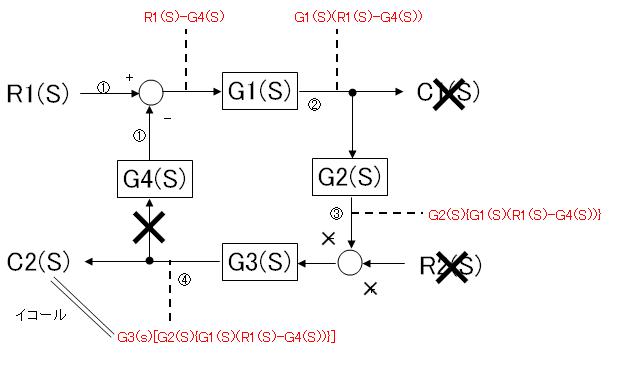
R1(S)が入力、C2(S)が出力です。入力と出力は1つしかないのでC1(S),R2(S)は削除します。
図10を見てください。まずはじめに①を見てください。
①からR1(S)-G4(S)が生成されます。同じような感じで②③④を見てください。
すると
C2(S)=G3(S)[G2(S){G1(S)(R1(S)-G4(S))}]
これより伝達関数W(S)=C2(S)/R1(S)は
W(S)=-G1(S)G2(S)G3(S)/{1-G1(S)G2(S)G3(S)G4(S)}となります。
(11)図に示すAは周波数伝達関数G(jω)のゲイン曲線で、Bはその閉ループ周波数伝達関数W(jω)のゲイン曲線である。次の問(ア)(イ)
に答えよ。
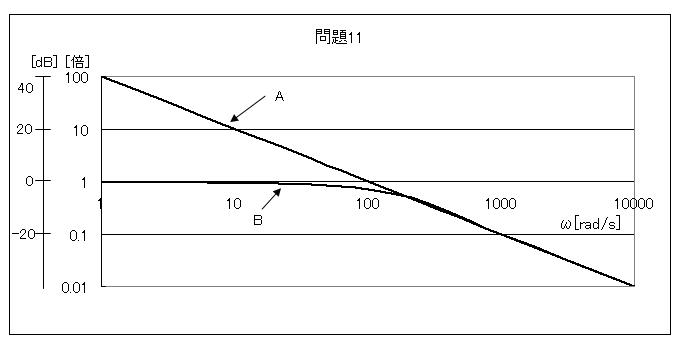
(ア)G(jω)のゲインはどれか。【13】
①1倍 ②10倍 ③20倍 ④40倍 ⑤100倍
正解 ⑤
【解説】
(図11)
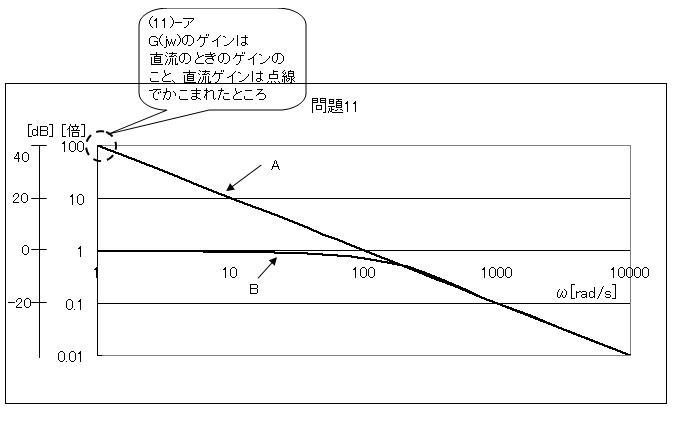
図11を見てください。G(jw)のゲインは直流信号を与えたときのゲインを言うので
100倍です。
(イ)W(jω)の式はどれか。【14】
①1/(0.01jω+1) ②10/(0.01jω+1) ③20/(0.01jω+1) ④40/(0.01jω+1) ⑤100/(0.01jω+1)
正解 ①
【解説】
たとえばw=100だとすると
①1/(j+1) ②10/(j+1) ③20/(j+1) ④40/(j+1) ⑤100/(j+1)
となりそれぞれの虚数の【大きさ】は
①1/√2 ②10/√2 ③20/√2 ④40/√2 ⑤100/√2 となります。
図11をみるとω=100のとき曲線Bは0.1より小さいです。したがって答えは①です。
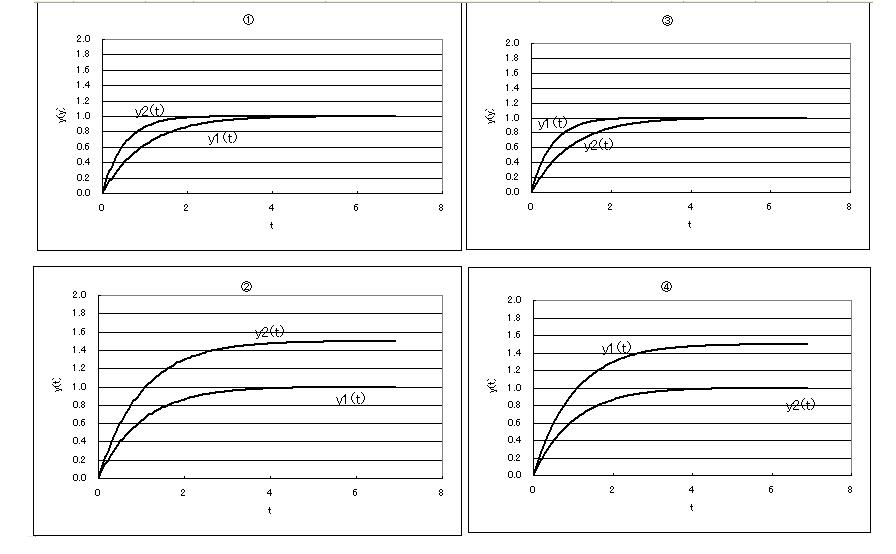
(12)図は、伝達関数がK1/Sなる要素の直結フィードバック制御系である。いま、この系に単位ステップ入力を与えたときの出力を
y1(t)、ゲインK1をK2(>K1)に変えたときの出力をy2(t)としたとき、y1(t)とy2(t)の関係は、①~④のうちのどれにあたるか。
【15】
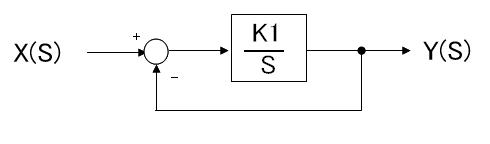
本問題で取り上げられている制御系の伝達関数は
Y(S)/X(S)=K1/(S+K1) となる。
したがって
Y(S)=(K1/(S+K1))X(S)
=(K1/(S+K1))*(1/S) ・・・・・(12)式
=K1/S-K1/(S+K1)
となる。
入力X(S)は単位ステップ入力。だからX(S)=1/S
これまではラプラス空間の世界で考えているので、これを実空間にもどす。
つまり、逆ラプラス変換を行う。
(12)式の逆ラプラス変換を行うと
y(t)=1-exp(-K1*t)・・・・・・(12-1)式
となる。この時点で①と③がのこるが、(12-1)式はK1が大きくなれば、より短い時間で1に近づいていくので
正解は①。この事実はゲインが大きいと系の反応速度がはやくなるという事実からも判断できる。
(13)次の(ア)と(イ)の文は、NC工作機械のテーブル駆動サーボ系に関する記述である。文中の()内に適切な用語を選んでいれ
正しい文にせよ。
(ア)安定なNCサーボ系を得るためには、機械系の固有振動数は、駆動系の固有振動数よりも
(【16】)ことが必要条件である。
(イ)NCサーボ系における定常速度偏差は、送り速度に(【17】)し、ループゲインに(【18】)
する。
①比例 ②反比例 ③長い ④短い ⑤大きい ⑥小さい
【16】 正解 ⑤
【17】 正解 ①
【18】 正解 ②
NCサーボ系の話はよくわかりません(*_*)
(14)次の文は、広域データ通信の基本とされているHDLC(High-level Data Link Control)手順について述べたものである。
文中の()内に、下記語句から適切なものを選び、記入せよ。
『HDLC手順は、データを(【19】)単位に分割して伝送する伝送制御手順である。この手順によれば、データの伝送単位を区切るマークは
01111110であり、これ以外の情報部ビット列では1が6個以上連続しないように0を挿入変換し、区切りマークと区別して送信している。
いま、受信側に送られてきた送信側の挿入変換された情報部ビット列が、
0100 1011 1110 1010
であったとすれば、送信側のもとの情報部ビット列は(【20】)である。』
①セル ②フレーム ③レコード ④シリンダ
⑤0100 1011 1111 010 ⑥0100 1111 1101 010
⑦0100 1111 1111 010 ⑧1001 0111 1101 010
⑨1001 1011 1111 010
【16】 正解 ②
【17】 正解 ⑤
HDLC手順はOSI基本参照モデルのデータリンク層にあたります。(図14-1)
HDLCは図14-2のように構成されます。フレームのはじめと終わりには"01111110"(1が6こ)がきます。
もしI(情報部)で1が6個つながると、受信する機器はフレームのはじめor終わりをあらわしているのか
本体の情報をあらわしているのかわかりませんね。したがって情報部で1が6個つづく状態になると
"111111"を"1111101"というように1が5番目と6番目のあいだに0を挿入します。
したがいまして、⑤番の0100 1011 1111 010の0100 1011 111<挿入0>1 010とすればOKです。
☆OSI基本参照モデル
簡単にいうと送信側と受信側の通信ルールを定めたもの。(決まりがないとコミュニケーションはできません)
たとえば、AさんがBさんに何かを伝えるときは「日本語で標準語を使用する」と決まりを定めることに似ています
図14-1
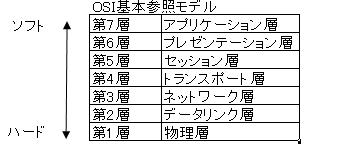
図14-2

(15)次のプログラム言語のうち、制御用プログラミングにもっとも適しているものはどれか。(【21】)
【15】 正解 ②
①PHP CGIの一種。サーバー上でhtmlを動的に作成する。(Webアプリケーション)
③Prolop 論理型言語
④Pascal 構造化言語
(16)プロセッサを制御するクロックパルスについて次の説明のうち、正しいものはどれか。(【22】)
①プロセッサはどれでも、命令フェッチ、命令解読、メモリアクセス、命令実行の一連の処理を1クロックパルスで実施する。
②1秒間に実行可能な命令数は、クロック周波数の逆数に等しい。
③プロセッサのアーキテクチャーが同じならば、クロック周波数の高いものほど単位時間当たりの実行命令数は多い。
④クロックパルスは、プログラムを実行するときにだけ利用されるので、周辺機器からの応答まちの間は停止している。
【16】 正解 ②
①命令フェッチ、命令解読、メモリアクセス、命令実行の一連の処理を1クロックで実施できない。
こちらをみてください
②処理するのにかかるクロック数は命令によって異なるので問題文のようなことはありえない
③正解
④ありえない記述です。
(17)次のプログラムを実行したとき、語Dの領域には何が入っているか。(【23】)
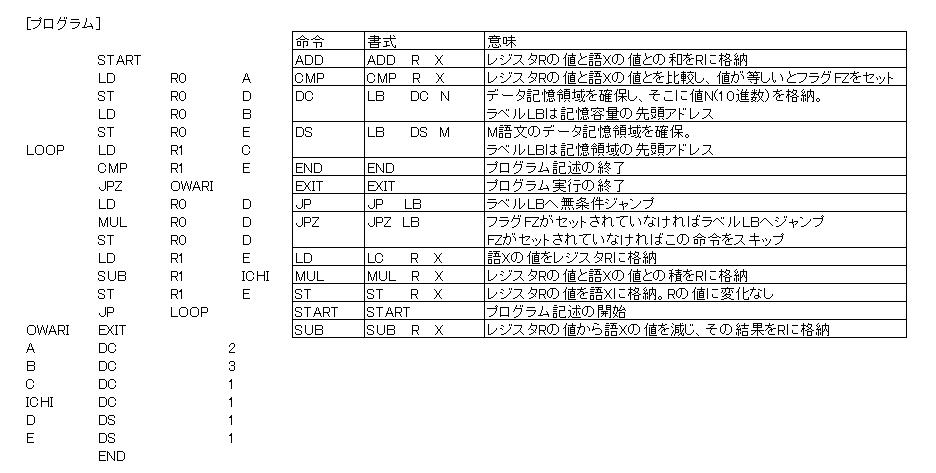
①2 ②4 ③8 ④16 ⑤32 ⑥64 ⑦80 ⑧128
最終更新:2005年08月23日 22:03



















