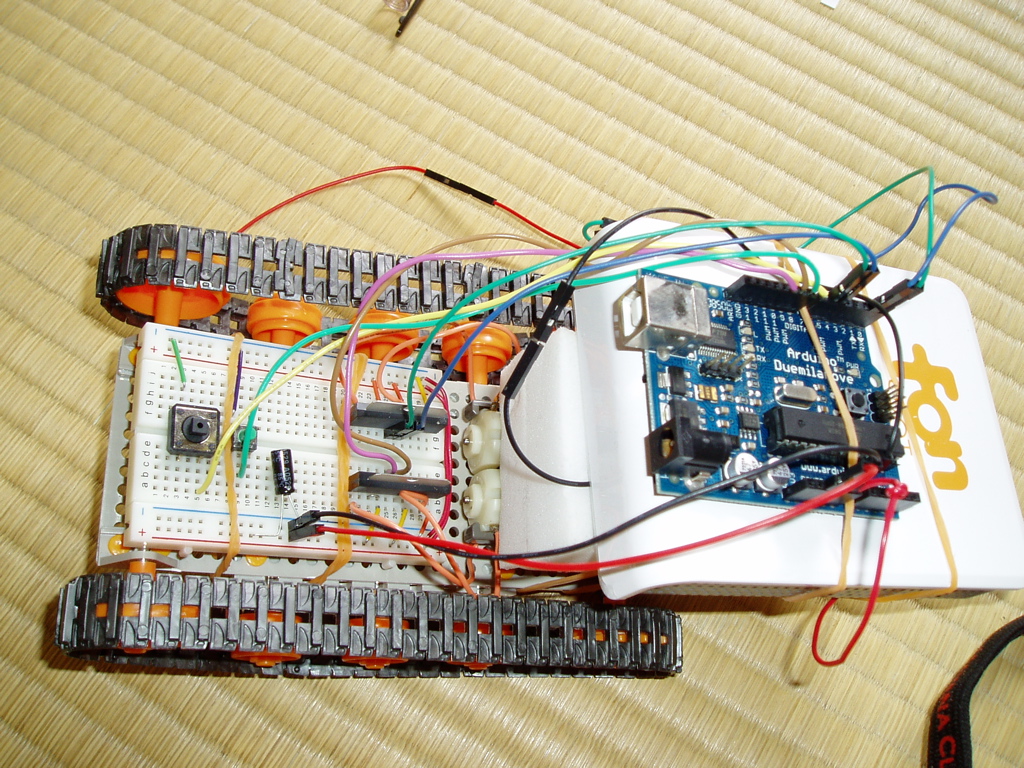
Arduino戦車(未完成)
材料
消費電流
●適正電圧(V)1.5
●適正負荷(トルク・g-cm)4.0
●適正電圧・適正負担荷時の回転数(r.p.m.)6,400
●適正電圧・適正負担荷時の消費電流(mA)500
モーター2個なので1A。流しすぎたら死ぬ。
電源
- FON2201の内部から+7.5Vを引き出しVinに入れる
- 3.3Vを引き出しTrevaの電源につかう→Arduinoも3.3V出せる
FONでインターネット戦車
ArduinoとFon
『TwitterBotをつくりました。Twitterで操作するロボット。』っていうネタなんだがいつできることやら。
センサー類
未完成メモ
Arduino配線
| Arduino |
接続先 |
色 |
| Vin |
FON 7.5V |
赤 |
| GND |
FON |
黒 |
| GND |
ブレッドボードGND |
黒 |
| 5V |
ブレッドボード5V |
赤 |
| 0 RX |
FON内部 |
緑 |
| 1 TX |
FON内部 |
青 |
| 5 |
モーターA 信号1 |
青 |
| 6 |
モーターA 信号2 |
緑 |
| 7 |
ボタンスイッチ1 |
黄 |
| 8 |
ボタンスイッチ2 |
緑 |
| 9 |
モーターB 信号1 |
青 |
| 10 |
モーターB 信号2 |
緑 |
モータードライバTA7291Pの配線
| 1 |
GND |
| 2 |
モータ |
| 3 |
NC(接続しない) |
| 4 |
+5V |
| 5 |
PWM信号←Arduino |
| 6 |
PWM信号←Arduino |
| 7 |
+5V |
| 8 |
+5V |
| 9 |
NC(接続しない) |
| 10 |
モータ |
最終更新:2009年07月04日 13:36
