「2010年7月」の編集履歴(バックアップ)一覧に戻る
2010年7月 - (2010/07/10 (土) 23:01:07) の編集履歴(バックアップ)
7月10日(土)月例会。
それぞれの役割分担での作業結果を報告。
- 田中:北陽センサーからの入力部分をRTミドルウェア化。
うまくいかず。この先、伊藤氏もこの作業を行ってみることに。
Segway社からもらったものがあり、それが利用できた。
実行プログラムはスクリプトで実行可能。コンポーネントの表示や接続はXMLファイルでできる。この部分は現在開発者のほうでも進行中の部分であり、今後モニターしていく。
これは、講習会の資料であった部分が使えるため、うまくいった。
以下、本日の感想。
RTミドルウェアの使用は、研究室のような開発体制に向いているように思われるので、困難を乗り越えてやっていきたい。
田中から、RTコンポーネントの接続図(案)が提示された。この図は、修正後ここにアップします。
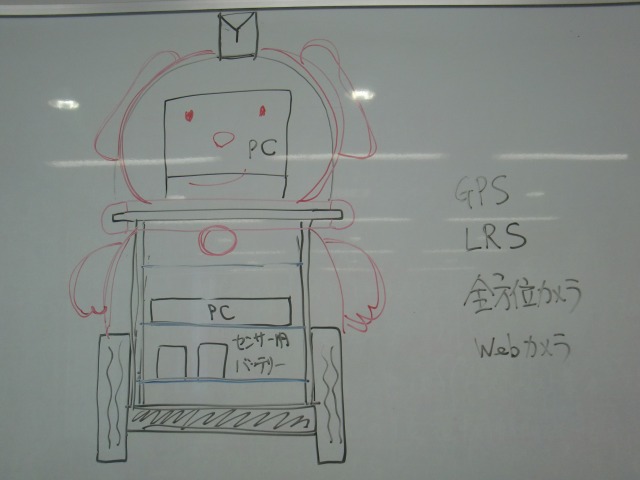
オドメトリーが優れているので、全方位カメラによる大域的な自己位置推定は不要かもしれない。KoRoの頭頂の帽子は、別のセンサーなどに変更する可能性あり。
バランスモードからトラクターモードに変えたときにSegwayが倒れてしまうのを何とか避けることはできないか。
いろいろアイデアを出し合ったが、もう一つ決定的な方法が見つからず。
8月の月例会は、26日-27日(合宿形式)。宿泊場所は、甲友倶楽部(予定)。
以下の写真は、ものを組み込んだKoRoの計画。