ここでは過去にスレやニコニコなどで発表されたPhun独自の力学と開発された技術をまとめています。
物性に関するまとめ
| |
-inf |
- |
0 |
+inf |
| Friction |
0と同じ |
0と同じ |
摩擦無し |
すぐ止まる |
| Bounciness(restitution) |
0と同じ |
0と同じ |
反発無し |
物体が消滅する |
| Density(weight) |
物消滅 |
物消滅 |
物消滅 |
下参照↓ |
【Density(weight)を[+inf]にした場合について】
backgroundにglueされた時の様に空中で静止します。
また、衝突判定はありますが、重心はありません。
Infomationを見てみると、
Mess,Velocity,Angular velocity,Energyが+infになっています。
| |
-inf |
- |
0 |
+inf |
| Controller acc |
物消滅 |
逆に動く |
動かない |
物消滅 |
Spring
| |
-inf |
- |
0 |
+inf |
| Strength |
物消滅 |
物消滅 |
バネ無と同 |
物消滅 |
| Damping |
物消滅 |
加速する |
抵抗ナイ |
物消滅 |
| Target length |
物消滅 |
強い |
強い |
物消滅 |
Damping: -で無限に加速できる(うまく制御できればつえかる)
Target: マイナス>0>整数(伸び)
Hinge
| |
-inf |
- |
0 |
+inf |
| Motor speed |
普通 |
逆回転 |
ブレーキ(強) |
普通 |
| Motor strength |
+infと同じ |
+と同じ |
動かない |
普通 |
| Impulse break limit |
+intと同じ |
+と同じ |
重力有壊 |
壊れない |
Motor speed:infはトルクをinfにすると物消滅、0はAuto-brakeより強い
Pen
| |
-inf |
- |
0 |
+inf |
| Fade time |
0と同じ |
0と同じ |
軌道無し |
600sで消える,後ろのグラデーション無し |
| Size |
見えなくなる |
+と同じ |
見えなくなる |
見えなくなる |
Fade: 恐らく600sが限界
Size: 大きすぎるとバグる
ロケット推進技術
埋め込み力方式
衝突判定の同じ物質が重なった際に生じる、お互いに反発しあう力を推力とする方式
埋め込み力により燃焼室が常時高圧になる性質上、推力の制御が難しい
はやぶさミッション提案者が発明し、その後ニコニコ宇宙軍などで改良された。
推進剤の保持方式の違いにより、推進剤を飛行軸に対して直角に、2箇所に分けて保持する「対向保持方式」(主にはやぶさミッション提案者方式)
ノズル部分に絞りを設けて推進剤を飛行軸方向に保持する「中央保持方式」(主にニコニコ宇宙軍方式)
がある。
対向保持方式
推進剤を埋め込み板と上部隔壁の間に保持する方式。遅延発火が可能で推進力が長持ちするが推力方向に不安定である。
中央保持方式
推進剤を飛行軸方向に保持する方式。出力が大きく振動が少ないが推進力が長持ちしにくく後半の推力が小さい。
超反発方式
超反発物質(物体のBounciness値が直接入力により1以上に設定された物質)へ
推進剤を衝突・反射させることにより発生する推力を利用する方式
推進剤の噴射速度を埋め込みロケットとは比較にならない高速まで高められるため性能が飛躍的に向上した。
推進剤の衝突量を調整することで推力の制御が可能なため、宇宙ミッションはもとよりヘリコプターや戦闘機などを
重力に逆らって飛行させるのにも有効である。
HALL999氏(時計の人)とのな。氏(現ニコニコ島Phun研究所)がほぼ同時期に発明した。
埋め込み超反発方式
埋め込みロケットから放出された粒子を超反発物質で跳ね返して噴射する複合推進。
埋め込み保持の保持力、短時間の大推力と超反発方式の性能の高さを併せ持つため、ミサイルに適している。
ニコニコ重工が超高速ロケット用に開発し、その後空対空、空対地ミサイルに応用。
ニコニコ重工製ロケットモーターはニコニコ島Phun研究所の地対空ミサイルにも流用された。
打ち出し方式
モーターやバネを使って推進剤を打ち出し推力を得る方式
埋め込み推進に比べ性能が非常に低いため、埋め込み推進や超反発推進が実用化されてからは一時期下火になったが、
最近では超高速で回転する羽根車に物質を衝突させて弾き飛ばすことで埋め込み推進以上の性能を得られるようになった。
空気抵抗推進技術
特殊プロペラ
Boxの中央にモータを付け、さらにBoxの先端にBoxをそれぞれ1個ずつモータで取り付けたもの。
中央のモータに対してアーム先のモーターを-1/2の角速度で回転させることにより、
Boxが上昇するときと下降するときの空気抵抗の差を生み出して推力を得る。
飛行船ニコアテもこの推進器を使用している。
TORISAN-ENGINE
負の空気抵抗物質
本来、抗力は物体の移動方向とは逆向きに働いて物体を減速させるが、もしこの抗力とやらが移動方向と同じ向きに働くとなると物体は加速することになる。
この物体にヒンジを付けてちょっと手で回してやると、勝手に加速してあっという間に高エネルギーが得られる。
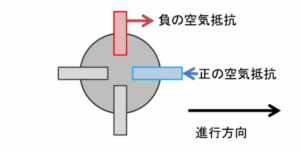
正の空気抵抗体と負の空気抵抗体の前方投射面積を変えることで、速度を自律的に安定させる。
トリサンエンジンの機構を用いることで、出力を安定させたもの。
空気抵抗体の前方投射面積を手動で変えることで、速度を制御するエンジン。
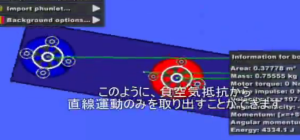
直線運動型
回転型
正負の空気抵抗を組み合わせることで、直線運動・回転運動を取り出す。
直線運動型は無限に加速する。
回転運動型の回転数は収束するが、収束する理由は不明。
VaD技術
VaD技術とはスクリプトで物体の質量を変更し、かつその物体をエンジン本体に対して加速運動させることによって推力を得るエンジンである。
使用された物体は再利用されるため、無限燃料に発生する位置ズレの発生が無く、かなりの速度であっても安定して飛行できる利点がある。
質量の変わる物体が循環運動をすれば大体どのような物でもVaDエンジンになる。
埋め込みリニア式
カラーボックス
回転式
レシプロ式VaDエンジン
レシプロエンジンを模したクランク、シリンダー、ピストンを持つ機構で、ピストンの往路と復路で密度を変化させることにより推進力を生み出す。
自己点滅振動子
エンジン本体のThyme物質ではなく、振動子自体にスクリプトを書き込み、振動子自身が質量や衝突判定を変更する方式。
PJ Systemsにより開発され、ミサイル用小型エンジンやVaD翼に使用される。
高出力だが、常に出力しているので取り扱いが難しい。また、シミュレーション速度に影響されやすい。
パルサーエンジン
飛行制御技術
モーメンタムホイール
錘にモータを取り付け回転数や方向を制御し、その反トルクにより機体の姿勢制御を行う機構
非常にシンプルな反面、錘にそれなりの質量が必要なので軽量化がこれからの課題?
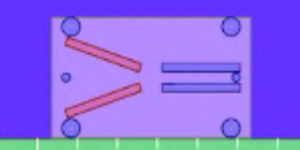
ヒンジスタビライザー
ある物体に円をヒンジで固定し、その後円をずらしてもう一度ヒンジで固定した装置
このようにヒンジに張力がかかった状態になると、物体は急に回転しにくくなり、姿勢が安定する。
また、ヒンジスタビライザーを機体本体にモータで固定することで、機体本体の姿勢を自由にコントロールできる。
モーメンタムホイールに比べ飛躍的に高い制御能力を持ち、同時に軽量化できる。
バネスタビライザー
現在はバージョンの壁によって使用することができない、過去の技術
ヒンジ固定されたboxをバネによって無理やり引っ張る方式
制御力はとてつもなく強大で、飛行機や二足歩行ロボット向けといえるだろう





