目的
シンプルなマニピュレータです。そのままでも、ドッキングの際の前段階などにも使用できると思います。
試験運転用に台座をヒンジで固定しているので、使用する際はこのヒンジは削除してください。
判定無の部品が多いですが、全体的に軽いので影響は少ないと思います。ダメなようでしたら、使用の際に適当な判定を割り振ってください(NSCにしておけば問題無いです)。
特徴
少々の衝撃ならば、腕が変形することで吸収します。
また、掴む部分のモーターは閉じる方がトグルスイッチになっており、掴んだあともスイッチを入れっぱなしにすることで外れにくくなります。
操作
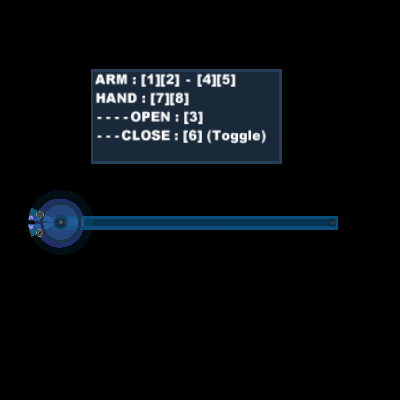
ロケット等と干渉しないように、テンキーに割り振ってみました。
腕の間接 : [1][2] , [4][5]
手の回転 : [7][8]
手の開閉 : [3][6(toggle)]
ダウンロード
 HR-003H.phz
HR-003H.phz
最終更新:2010年05月03日 15:53
