自宅用中型監視ロボットを製作しよう!
MicroATXを用いて多機能かつメンコいロボットを作ることを目的とする。
搭載予定機能
- 無線LAN
- カメラ(画像解析)
- 自動ブログ作成
- キャタピラ(最初はタイヤかなぁ)
現在開発中の機体
穴あきアルミ板を加工してフレームにした。
移動はステッピングモータで行う。
写真ではマイコンしか乗っていないが、
今後フレームを若干大型化してMINI-ITX規格のマザボを載せる。
#ref error :ご指定のファイルが見つかりません。ファイル名を確認して、再度指定してください。 (myrobot001.jpg)
搭載予定メインPC
現在マシンに搭載予定の小型マザーボード
GIGABYTE製のGA-GC230Dである。
企画はMINI-ITXで17センチ四方とかなり小型。
ATOMが乗っているので、余計なソフトを入れなければかなりサクサク動く。
こいつにUSBカメラを載せてVC++で制御する。
ちなみに12Vのバッテリーで動いてくれる(はず)。
電源が12VのACアダプタ(120W)というかなりの変わり者。
長時間駆動を目標にしなければバッテリー搭載も可能だろう。
#ref error :ご指定のファイルが見つかりません。ファイル名を確認して、再度指定してください。 (mainpc.jpg)
使用ステッピングモータ
軸が6.35mmなので、M6のナットを加工した
これによってタミヤのラジコン用タイヤが使えるようになる。
若干ナットの方が小さいので、アルミやプラ板なので隙間を埋めるとよい。
#ref error :ご指定のファイルが見つかりません。ファイル名を確認して、再度指定してください。 (nat.jpg)
本体駆動用のマザーボード
H8/3694とH8/3069を使用
ここからADとステッピングモータの駆動、
そのほかスイッチ等の入出力を行う。
メインの命令はGIGABYTEマザボからシリアル通信にて行う。
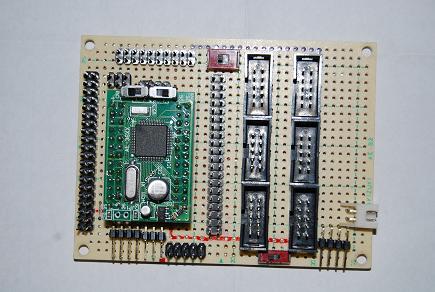

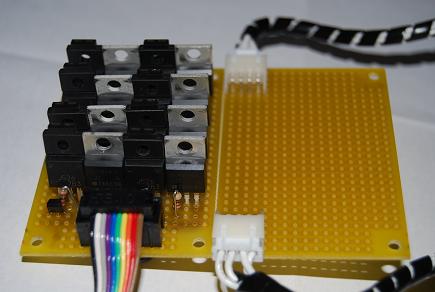
ステッピングモータ用のFETドライバ
バイポーラタイプではあるが、二相二励駆動のため
信号入力は片輪につき二本。
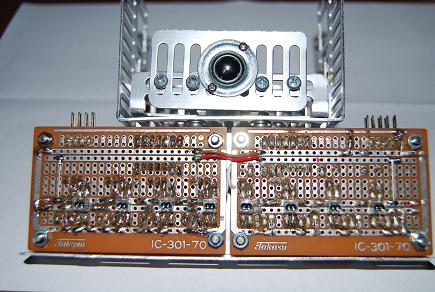
ライントレース用センサ
以前秋月で取り扱っていたフォトインタラプタを用いたライントレースセンサ。
NOT回路を間にはさんで、マイコンに8ビットデータを出力する。
最終更新:2009年08月02日 15:32



