新規作成
新規ページ作成
新規ページ作成(その他)
このページをコピーして新規ページ作成
このウィキ内の別ページをコピーして新規ページ作成
このページの子ページを作成
新規ウィキ作成
編集
ページ編集
ページ編集(簡易版)
ページ名変更
メニュー非表示でページ編集
ページの閲覧/編集権限変更
ページの編集モード変更
このページにファイルをアップロード
メニューを編集
バージョン管理
最新版変更点(差分)
編集履歴(バックアップ)
アップロードファイル履歴
このページの操作履歴
このウィキのページ操作履歴
ページ一覧
ページ一覧
このウィキのタグ一覧
このウィキのタグ(更新順)
このページの全コメント一覧
このウィキの全コメント一覧
おまかせページ移動
掲示板
このウィキのスレッド一覧
このページのスレッド一覧
RSS
このウィキの更新情報RSS
このウィキ新着ページRSS
ヘルプ
ご利用ガイド
Wiki初心者向けガイド(基本操作)
このウィキの管理者に連絡
運営会社に連絡(不具合、障害など)
掲示板
ページ検索
メニュー
岡山大学ロボット研究会 制御班 技術開発部@ ウィキ
操作ガイド
新規作成
編集する
全ページ一覧
掲示板
登録/ログイン
岡山大学ロボット研究会 制御班 技術開発部@ ウィキ
操作ガイド
新規作成
編集する
全ページ一覧
掲示板
登録/ログイン
ページ一覧
岡山大学ロボット研究会 制御班 技術開発部@ ウィキ
このページを編集する
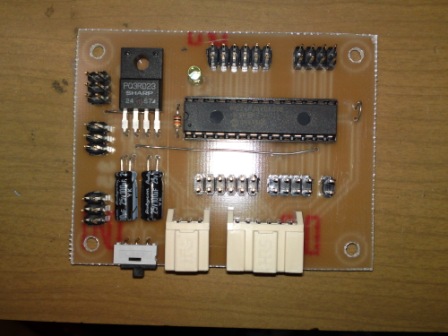
PICのテスト回路
PIC24F用テスト回路
PICテスト回路について紹介します。
PICの各Pinの入出力機能をピンヘッダを用い簡単にテストすることができる便利回路です。
PICの勉強や機能を少し試したいという時に使ってください
画像
更新履歴
2011/12/27 : PIC回路記載&回路図を上げる
回路図
追加日
ファイル
2011/12/27
PICテスト回路_20111227.zip
タグ:
+ タグ編集
タグ:
タグの更新に失敗しました
エラーが発生しました。ページを更新してください。
ページを更新
いいね!
「PICのテスト回路」をウィキ内検索
最終更新:2011年12月28日 00:38
ツールボックス
下から選んでください:
新しいページを作成する
以下から選択してください
-------------------------
このページを編集
ページ名変更
差分
編集履歴
アップロード
-------------------------
新しいページ
ページ一覧
検索
-------------------------
ヘルプ
/
FAQ
もご覧ください。
メニュー
メニュー
トップページ
回路
MBE部品ライブラリ
基板加工
モータドライバ
MTD_LF
ハンダ付け
プログラム
SH
AD変換
PIC
テスト回路
導入
タイマ
PWM
UART
SPI
AD変換
制御
オムニホイール
リンク
岡山大学ロボット研究会HP
Total :
-
回
Today :
-
回
Yesterday :
-
回
ここを編集
rss & コンタクト & タグ
更新履歴
RSS Feed
管理者に連絡
タグ一覧