v0.99.73以降、等速以外の選択が可能。
「
移動力を絶対値で指定」「移動力を相対値で指定」には反映せず。
「目標座標を絶対値で指定」「目標座標を相対値で指定」に反絵愛される。
「目標座標を絶対値で指定」「目標座標を相対値で指定」であっても、SBには慣性があるため、目標座標で停止しない。
移動(直交座標)パネルで「指定した移動時間のフレーム数」の分だけ「時間待ち(フレーム待ち)」にして、
その次に移動(停止)パネルで「移動力を0」を設定する必要あり。
基本的に、指定された目標座標(絶対座標/相対座標)まで、指定された移動時間(フレーム数)で到達。
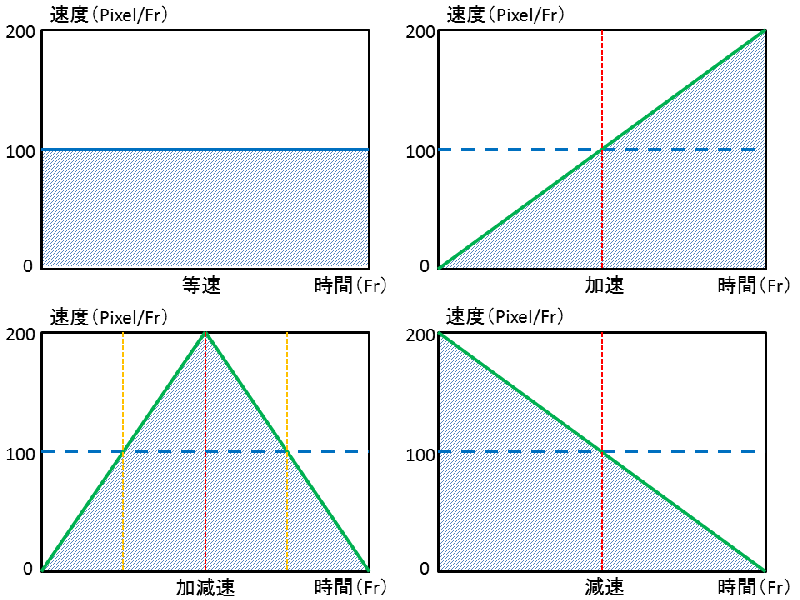
①等速=一定速度で(途中で速度を変えずに)到達。
→目標座標までの移動距離を、移動時間で除算した「平均速度」で、開始から到達まで移動。
②加速=開始点より速度0から加速していき、加速した状態で到達。
→到達時の速度は、等速時の平均速度を超える。
③減速=目標点で速度0になるように減速しながら、最終的に速度0で到達。
→移動開始時の速度は、等速時の平均速度を超える。
④
加減速=開始点より速度0から加速していき、最高速に達した後は途中から減速し、目標点で速度0になるように減速しながら到達。
→中間地点の速度は、等速時の平均速度を超える。
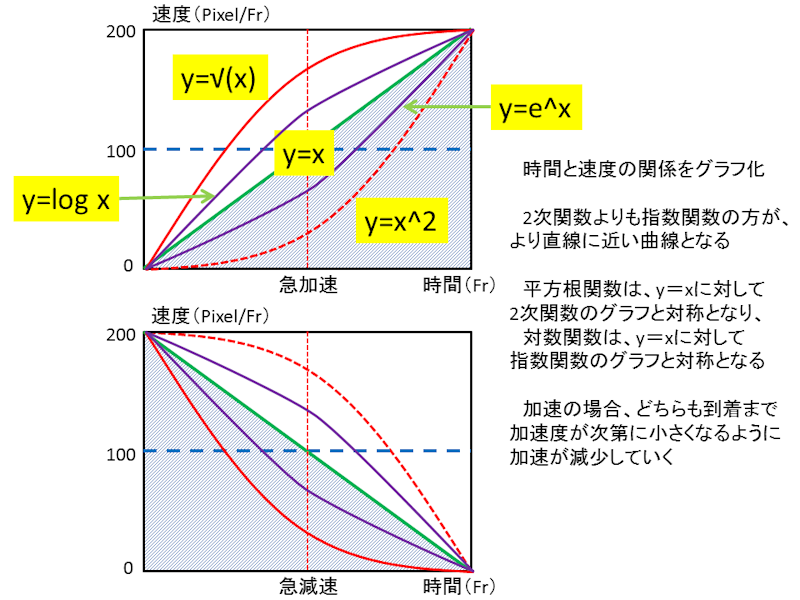
⑤急加速=開始点より遅れて速度0から加速度的に加速していき、かなり加速した状態で到達。
→急加速では、加速よりも加速率が高いため、序盤はなかなか移動開始しないが、後半に猛烈に加速して追いつく。
⑥急減速=目標点で速度0になるように、目標ギリギリから急激に減速しながら到達。
→急減速では、減速よりも減速率が高いため、前半は早めに目標付近まで来るが、終盤は急激に減速して時間を稼ぐ。
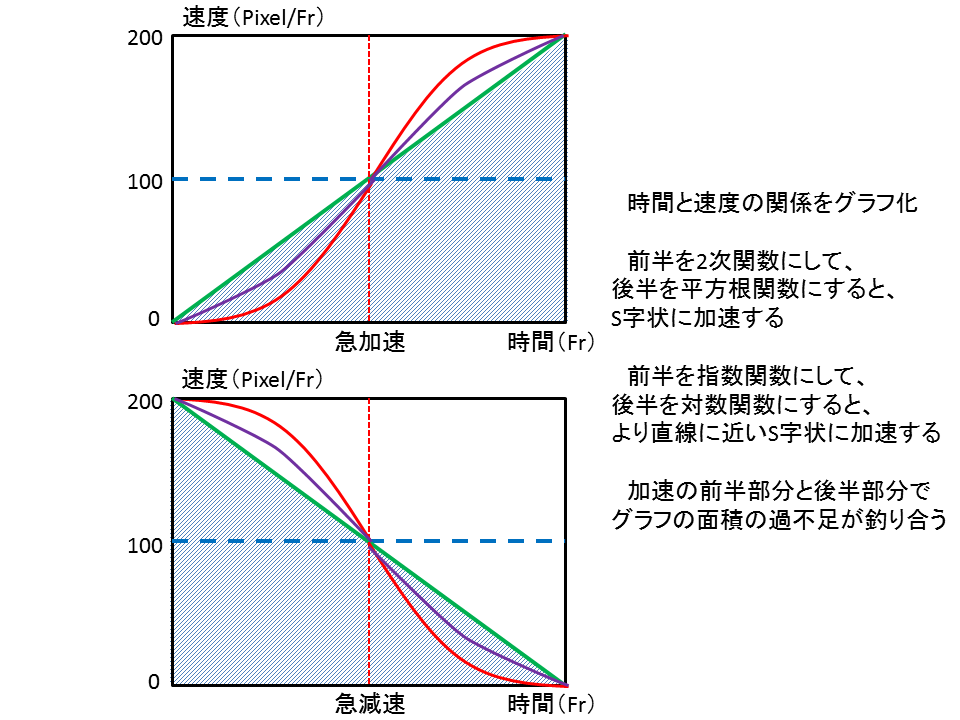
⑦急加減速=開始点より速度0から加速していき、最高速に達した後は途中から減速し、目標点で速度0になるように減速しながら到着します
→急加減速では、加減速よりも、加速開始が遅く、急激に加速して最高速となり、減速開始も遅く、目標手前で急激に減速して停止する。
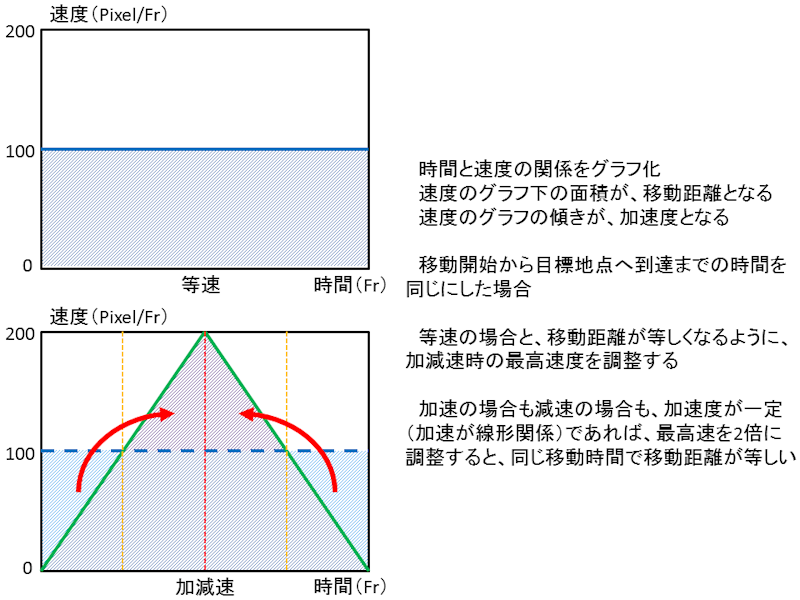
加速,減速,加減速を線形(1次関数)と仮定
加減速を線形(1次関数)と仮定
等速時の平均速度と加減速時の最高速度の関係
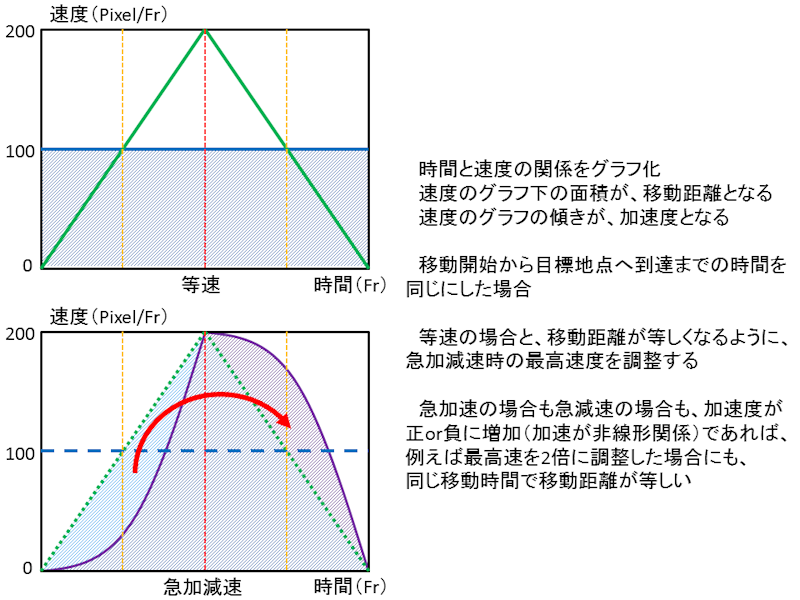
急加減速を非線形(2次関数)と仮定
等速時の平均速度と急加減速時の最高速度の関係
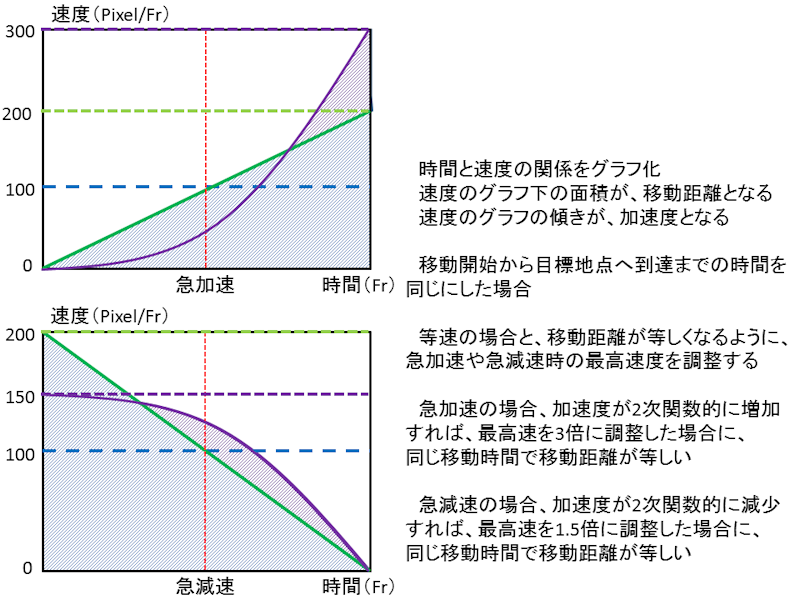
急加速,急減速を非線形(2次関数)と仮定
等速時の平均速度と急加速・急減速時の最高速度の関係
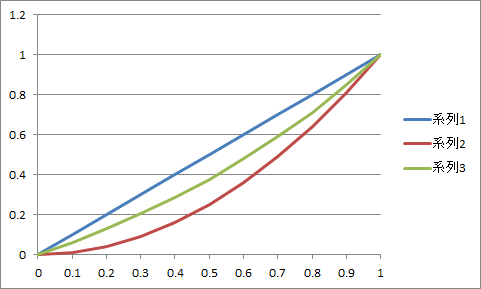
系列1=1次関数
系列2=指数関数
系列3=2次関数
平方根関数,対数関数,1次関数,指数関数,2次関数
2次関数で加速+平方根関数で減速
指数関数で加速+対数関数で減速
1次関数
最終更新:2013年10月01日 11:17






