レイによる距離測定
物体と物体との距離はいくつか方法は考えられると思います。
ここでは、Rayを使って距離を測定する方法を紹介します。
メモ書きです。
ここでは、Rayを使って距離を測定する方法を紹介します。
メモ書きです。
 test_raycast.zip
test_raycast.zip
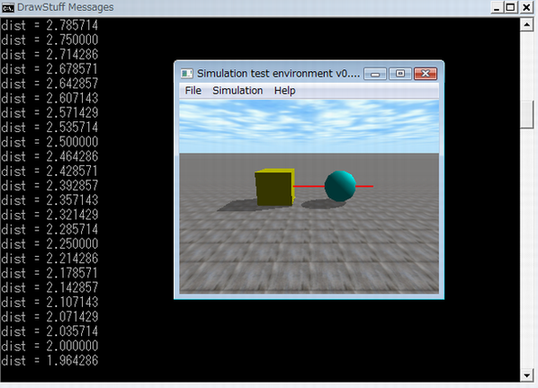
ボックスに距離センサーとなるRay(半直線)を付けています。
そこに近づくボールとの距離を表示します。
そこに近づくボールとの距離を表示します。
レイキャスト
レイキャストをご存知でしょうか。
レイキャスト(raycast)とは、ワールド空間にRayと呼ぶ半直線を引き、これに衝突するジオメトリを検出することを言う。らしい。
物理エンジンの世界ではそういうものがあるらしいです。
詳しくは、
レイキャスト(raycast)とは、ワールド空間にRayと呼ぶ半直線を引き、これに衝突するジオメトリを検出することを言う。らしい。
物理エンジンの世界ではそういうものがあるらしいです。
詳しくは、
という本でも読んでみてください。
ODEでもRayで似たような機能があるので試してみました。
全コード
#ifdef WIN32
#include <windows.h>
#endif
#include <ode/ode.h>
#include <drawstuff/drawstuff.h>
#ifdef dDOUBLE
#define dsDrawBox dsDrawBoxD
#define dsDrawSphere dsDrawSphereD
#define dsDrawLine dsDrawLineD
#endif
#define MAX_CONTACTS 4 // 最大の衝突検出可能数
static dWorldID world;
static dSpaceID space;
static dJointGroupID contactgroup;
static dBodyID body_box;
static dGeomID geom_box;
static dGeomID geom_ray;
static dBodyID body_ball;
static dGeomID geom_ball;
dReal dist; // rayに接触した物体の距離を保持
// 衝突検出用関数
static void nearCallback( void *data, dGeomID o1, dGeomID o2 )
{
dBodyID b1 = dGeomGetBody( o1 ); // 物体1
dBodyID b2 = dGeomGetBody( o2 ); // 物体2
if ( b1 && b2 && dAreConnectedExcluding( b1, b2, dJointTypeContact ) )
return; // 衝突対象でない物体の衝突ははずす
//////////////////////////////////////////////////////////
// 距離を取得
if (o1==geom_ray || o2==geom_ray) {
dContactGeom c;
int numc = dCollide( o1, o2, 1, &c, sizeof( dContactGeom ) );
if (numc > 0) {
dist = c.depth; // depthはrayの始点位置からの距離
}
return;
}
//////////////////////////////////////////////////////////
dContact contact[MAX_CONTACTS];
for ( int i=0; i<MAX_CONTACTS; i++ )
{
// 物体同士の接触時のパラメータ設定
contact[i].surface.mode = dContactBounce | dContactSoftERP | dContactSoftCFM;
contact[i].surface.mu = dInfinity; // 摩擦係数
contact[i].surface.bounce = 0.5; // 反発係数
contact[i].surface.soft_erp = 0.3; // ERP設定
contact[i].surface.soft_cfm = 0.0001; // CFM設定
}
// 衝突検出
int numc = dCollide( o1, o2, MAX_CONTACTS, &contact[0].geom, sizeof( dContact ) );
if ( numc > 0 )
{
for ( int i=0; i<numc; i++ )
{
// 衝突の発生
dJointID c = dJointCreateContact( world, contactgroup, contact+i );
// 接触ジョイント生成
dJointAttach( c, b1, b2 ); // 接触ジョイント接続
}
}
}
// start simulation - set viewpoint
static void start()
{
static float xyz[3] = { 2.f, -10.f, 3.f };
static float hpr[3] = { 90.f, -15.f, 0.f };
dsSetViewpoint( xyz, hpr );
}
// simulation loop
static void simLoop( int pause )
{
dist = -1.0;
// Ctl+p が押されたらifに入らない
if (!pause)
{
dSpaceCollide( space, 0, &nearCallback ); // 衝突検出
dWorldStep( world, 0.01 );
dJointGroupEmpty( contactgroup );
}
///////////////////////////////////////////////////
// 距離表示
if (dist>=0.0) {
printf( "dist = %f\n", dist );
}
///////////////////////////////////////////////////
// draw box
{
dsSetColor( 1.0f, 1.0f, 0.0f );
dVector3 size;
dGeomBoxGetLengths( geom_box, size );
dsDrawBox( dGeomGetPosition( geom_box ), dGeomGetRotation( geom_box ), size );
}
// draw ray
{
dsSetColor( 1.0f, 0.0f, 0.0f );
dVector3 Origin, Direction;
dGeomRayGet(geom_ray, Origin, Direction);
dReal Length = dGeomRayGetLength(geom_ray);
dVector3 End;
End[0] = Origin[0] + (Direction[0] * Length);
End[1] = Origin[1] + (Direction[1] * Length);
End[2] = Origin[2] + (Direction[2] * Length);
End[3] = Origin[3] + (Direction[3] * Length);
dsDrawLine(Origin, End);
}
// draw ball
{
dsSetColor( 0.0f, 1.0f, 1.0f );
dReal radius = dGeomSphereGetRadius( geom_ball );
dsDrawSphere( dGeomGetPosition( geom_ball ), dGeomGetRotation( geom_ball ), radius );
}
}
int main( int argc, char* argv[] )
{
dInitODE();
// setup pointers to drawstuff callback functions
dsFunctions fn;
fn.version = DS_VERSION;
fn.start = &start;
fn.step = &simLoop;
fn.command = 0;
fn.stop = 0;
fn.path_to_textures = "../drawstuff/textures";
world = dWorldCreate();
dWorldSetGravity( world, 0.0, 0.0, -9.8 );
space = dHashSpaceCreate( 0 );
contactgroup = dJointGroupCreate( 0 );
// plane create
{
dCreatePlane( space, 0, 0, 1, 0 );
}
// box creating
{
dReal pos[3] = { 0.0, 0.0, 1.5 };
dReal size[3] = { 2.0, 2.0, 2.0 };
// body setting
body_box = dBodyCreate( world );
dBodySetPosition( body_box, pos[0], pos[1], pos[2] );
// geom setting
geom_box = dCreateBox( space, size[0], size[1], size[2] );
dGeomSetBody( geom_box, body_box );
// mass setting
dMass mass;
dMassSetBoxTotal( &mass, 10.0, size[0], size[1], size[2] ); // 10kg
dBodySetMass( body_box, &mass );
// rotation
dMatrix3 R;
dRFromAxisAndAngle( R, 1.0, 0.0, 0.0, 0.0*M_PI/180 );
dBodySetRotation( body_box, R );
//// fixed joint setting
//dJointID fixed;
//fixed = dJointCreateFixed( world, 0 );
//dJointAttach( fixed, NULL, body_box );
//dJointSetFixed( fixed );
}
// Ray setting
{
dReal pos[3] = { 1.0, 0.0, 0.0 };
dReal length = 5.0;
geom_ray = dCreateRay( space, length );
dGeomSetBody( geom_ray, body_box ); // <= body is box
// position and rotation setting
dGeomSetOffsetPosition( geom_ray, pos[0], pos[1], pos[2] );
dMatrix3 R;
dRFromAxisAndAngle( R, 0.0, 1.0, 0.0, 90.0*M_PI/180 );
dGeomSetOffsetRotation( geom_ray, R );
//dGeomRaySet( geom_ray, pos[0], pos[1], pos[2], dir[0], dir[1], dir[2] );
}
// ball creating
{
dReal pos[3] = { 10.0, 0.0, 1.0 };
dReal radius = 1.0;
// body setting
body_ball = dBodyCreate( world );
dBodySetPosition( body_ball, pos[0], pos[1], pos[2] );
// geom setting
geom_ball = dCreateSphere( space, radius );
dGeomSetBody( geom_ball, body_ball );
// mass setting
dMass mass;
dMassSetSphereTotal( &mass, 1.0, radius ); // 10kg
dBodySetMass( body_ball, &mass );
// rotation
dMatrix3 R;
dRFromAxisAndAngle( R, 1.0, 0.0, 0.0, 0.0*M_PI/180 );
dBodySetRotation( body_ball, R );
}
//ボールを転がす
dBodyAddForce( body_ball, -500.0, 0.0, 0.0 );
dsSimulationLoop( argc, argv, 320, 240, &fn );
dWorldDestroy( world );
dCloseODE();
return 0;
}
ポイント
ポイントは、衝突検出機能を使ってrayと他のgeomとの接触を検出するところです。
- nearCallback関数内
// 距離を取得
if (o1==geom_ray || o2==geom_ray) {
dContactGeom c;
int numc = dCollide( o1, o2, 1, &c, sizeof( dContact ) );
if (numc > 0) {
dist = c.depth; // depthはrayの始点位置からの距離
}
return;
}
o1もしくはo2がgeom_rayのときは、ContactJointを接続させません。つまり衝突を起こさせません。
なので、dContactではなく、事足りるのでdGeomContactを使っています。
また、dContactGeomのdepthは、rayとの衝突のときに限りrayの始点位置からの距離が格納されます。
なので、dContactではなく、事足りるのでdGeomContactを使っています。
また、dContactGeomのdepthは、rayとの衝突のときに限りrayの始点位置からの距離が格納されます。
ちなみに、rayはボディを持ちません。(持たせることも可能でしょうが普通は持たせないでしょう)
なので、今回はボックスのボディに接続しています。
ただ、そのまま付けても位置はボックスと位置になってしまうので、dGeomSetOffsetPositionとdGeomSetOffsetRotationを使ってボックスから位置と方向を変えています。
なので、今回はボックスのボディに接続しています。
ただ、そのまま付けても位置はボックスと位置になってしまうので、dGeomSetOffsetPositionとdGeomSetOffsetRotationを使ってボックスから位置と方向を変えています。
まとめ
Rayを使って距離を求めることで物体の面との距離を測定することができます。
今回のRayの使用方法がODE開発者の意図したものかはわかりませんが、いろいろと応用はできると思います。
今回のRayの使用方法がODE開発者の意図したものかはわかりませんが、いろいろと応用はできると思います。
ちょっと残念なのはRayの衝突がコールバックになっていないことでしょうか?
ODE全体に言えることですがオブジェクト指向でないのは、大きなプログラムを書くときにちょっと大変になりそうです。
ODE全体に言えることですがオブジェクト指向でないのは、大きなプログラムを書くときにちょっと大変になりそうです。
