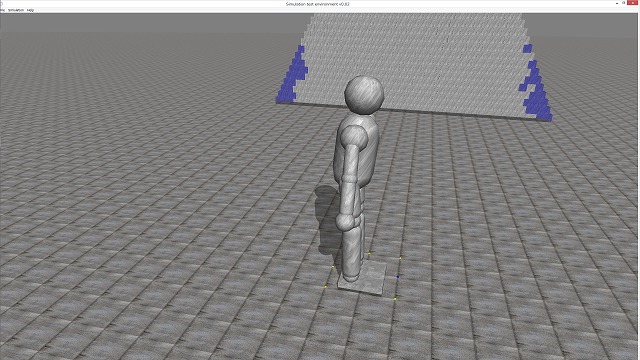
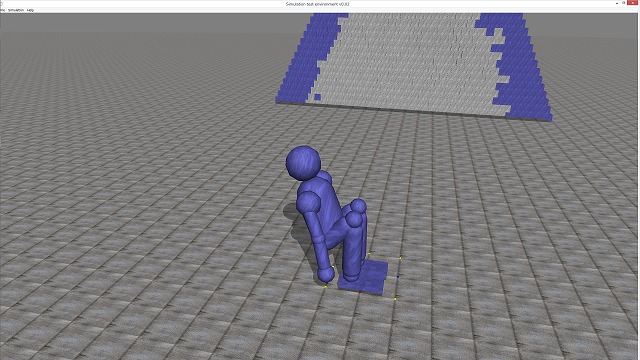
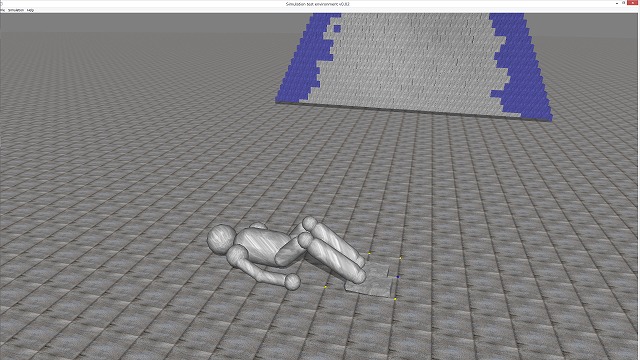
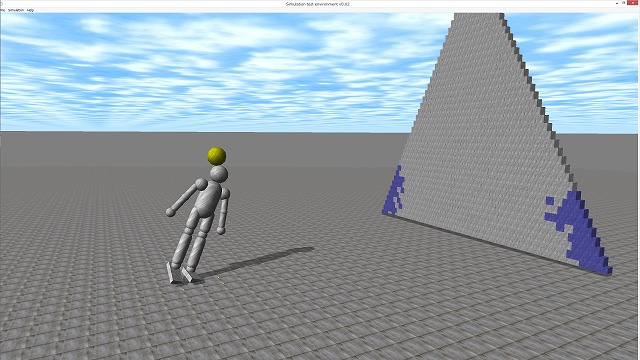
足、腕、胴体、頭から成る人間型のオブジェクトを生成する。 足は、足首、膝、股関節に関節を持ち可動範囲を人間に近づくよう設定する。 腕も同様に肘、方に関節を設定する。 頭は簡易的にただの球体をジョイントで接続した。

static dSpaceID human_space;
static dBodyID hLeg_R_body[3];
static dGeomID hLeg_R_geom[3][10];
static dJointID hLeg_R_joint[3];
static dBodyID hLeg_L_body[3];
static dGeomID hLeg_L_geom[3][10];
static dJointID hLeg_L_joint[3];
static dBodyID trunk_body;
static dGeomID trunk_geom[3];
static dBodyID head_body;
static dGeomID head_geom;
static dJointID head_joint;
static dJointID hArm_L_joint[3];
static dBodyID hArm_L_body[3];
static dGeomID hArm_L_geom[3][10];
static dJointID hArm_R_joint[3];
static dBodyID hArm_R_body[3];
static dGeomID hArm_R_geom[3][10];
static dJointID hHand_R_joint;
static dBodyID hHand_R_body;
static dGeomID hHand_R_geom;
static dJointID hHand_L_joint;
static dBodyID hHand_L_body;
static dGeomID hHand_L_geom;#define HUMAN
#ifdef HUMAN
#undef SCALE
#define SCALE 5
#define HUMAN_LEG_BASE_X 0.11*SCALE
#define HUMAN_LEG_BASE_Y 0.25*SCALE
#define HUMAN_LEG_BASE_Z 0.05*SCALE
#define HUMAN_LEG_SHANK_X HUMAN_LEG_BASE_X*0.5
#define HUMAN_LEG_SHANK_Y HUMAN_LEG_BASE_X
#define HUMAN_LEG_SHANK_Z 0.25*SCALE
#define HUMAN_LEG_THIGH_X HUMAN_LEG_BASE_X*0.5
#define HUMAN_LEG_THIGH_Y HUMAN_LEG_BASE_X
#define HUMAN_LEG_THIGH_Z 0.15*SCALE
#define HUMAN_LEG_DISTANCE 0.15*SCALE
#define HUMAN_LEG_LENGTH (HUMAN_LEG_BASE_Z+HUMAN_LEG_SHANK_Z+HUMAN_LEG_THIGH_Z)
#define MASS (1.0)
#define HUMAN_HEAD_RAD 0.1*SCALE
{
dMass m;
// R LEG
hLeg_R_body[0] = dBodyCreate (world);
dBodySetPosition(hLeg_R_body[0],HUMAN_LEG_DISTANCE,0,HUMAN_LEG_BASE_Z/2);
dMassSetBox( &m, 1, HUMAN_LEG_BASE_X, HUMAN_LEG_BASE_Y, HUMAN_LEG_BASE_Z );
dMassAdjust( &m, MASS );
dBodySetMass( hLeg_R_body[0], &m );
hLeg_R_geom[0][0] = dCreateBox (human_space,HUMAN_LEG_BASE_X,HUMAN_LEG_BASE_Y,HUMAN_LEG_BASE_Z);
dGeomSetBody(hLeg_R_geom[0][0],hLeg_R_body[0]);
hLeg_R_body[1] = dBodyCreate (world);
hLeg_R_geom[1][0] = dCreateCapsule (human_space,HUMAN_LEG_SHANK_X,HUMAN_LEG_SHANK_Z);
dGeomSetBody(hLeg_R_geom[1][0],hLeg_R_body[1]);
dBodySetPosition(hLeg_R_body[1],HUMAN_LEG_DISTANCE,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_BASE_Z+HUMAN_LEG_SHANK_Z/2+0.07*SCALE);
hLeg_R_body[2] = dBodyCreate (world);
hLeg_R_geom[2][0] = dCreateCapsule (human_space,HUMAN_LEG_THIGH_X,HUMAN_LEG_THIGH_Z);
dGeomSetBody(hLeg_R_geom[2][0],hLeg_R_body[2]);
dBodySetPosition(hLeg_R_body[2],HUMAN_LEG_DISTANCE,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_BASE_Z+HUMAN_LEG_SHANK_Z+HUMAN_LEG_THIGH_Z/2+0.2*SCALE);
hLeg_R_joint[0] = dJointCreateHinge( world, 0 );
dJointAttach( hLeg_R_joint[0], hLeg_R_body[0], hLeg_R_body[1] );
dJointSetHingeAnchor(hLeg_R_joint[0],HUMAN_LEG_DISTANCE,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_BASE_Z+0.03*SCALE);
dJointSetHingeParam(hLeg_R_joint[0], dParamLoStop, -0.3 * M_PI);
dJointSetHingeParam(hLeg_R_joint[0], dParamHiStop, 0 * M_PI);
hLeg_R_joint[1] = dJointCreateHinge( world, 0 );
dJointAttach( hLeg_R_joint[1], hLeg_R_body[1], hLeg_R_body[2] );
dJointSetHingeAnchor(hLeg_R_joint[1],HUMAN_LEG_DISTANCE,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_BASE_Z+HUMAN_LEG_SHANK_Z+0.14*SCALE);
dJointSetHingeParam(hLeg_R_joint[1], dParamLoStop, -0.8 * M_PI);
dJointSetHingeParam(hLeg_R_joint[1], dParamHiStop, 0 * M_PI);
// L LEG
hLeg_L_body[0] = dBodyCreate (world);
dBodySetPosition(hLeg_L_body[0],0,0,HUMAN_LEG_BASE_Z/2);
dMassSetBox( &m, 1, HUMAN_LEG_BASE_X, HUMAN_LEG_BASE_Y, HUMAN_LEG_BASE_Z );
dMassAdjust( &m, MASS );
dBodySetMass( hLeg_L_body[0], &m );
hLeg_L_geom[0][0] = dCreateBox (human_space,HUMAN_LEG_BASE_X,HUMAN_LEG_BASE_Y,HUMAN_LEG_BASE_Z);
dGeomSetBody(hLeg_L_geom[0][0],hLeg_L_body[0]);
hLeg_L_body[1] = dBodyCreate (world);
hLeg_L_geom[1][0] = dCreateCapsule (human_space,HUMAN_LEG_SHANK_X,HUMAN_LEG_SHANK_Z);
dGeomSetBody(hLeg_L_geom[1][0],hLeg_L_body[1]);
dBodySetPosition(hLeg_L_body[1],0,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_BASE_Z+HUMAN_LEG_SHANK_Z/2+0.07*SCALE);
hLeg_L_body[2] = dBodyCreate (world);
hLeg_L_geom[2][0] = dCreateCapsule (human_space,HUMAN_LEG_THIGH_X,HUMAN_LEG_THIGH_Z);
dGeomSetBody(hLeg_L_geom[2][0],hLeg_L_body[2]);
dBodySetPosition(hLeg_L_body[2],0,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_BASE_Z+HUMAN_LEG_SHANK_Z+HUMAN_LEG_THIGH_Z/2+0.2*SCALE);
hLeg_L_joint[0] = dJointCreateHinge( world, 0 );
dJointAttach( hLeg_L_joint[0], hLeg_L_body[0], hLeg_L_body[1] );
dJointSetHingeAnchor(hLeg_L_joint[0],0,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_BASE_Z+0.02*SCALE);
dJointSetHingeParam(hLeg_L_joint[0], dParamLoStop, -0.3 * M_PI);
dJointSetHingeParam(hLeg_L_joint[0], dParamHiStop, 0 * M_PI);
hLeg_L_joint[1] = dJointCreateHinge( world, 0 );
dJointAttach( hLeg_L_joint[1], hLeg_L_body[1], hLeg_L_body[2] );
dJointSetHingeAnchor(hLeg_L_joint[1],0,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_BASE_Z+HUMAN_LEG_SHANK_Z+0.14*SCALE);
dJointSetHingeParam(hLeg_L_joint[1], dParamLoStop, -0.8 * M_PI);
dJointSetHingeParam(hLeg_L_joint[1], dParamHiStop, 0 * M_PI);
#define HUMAN_TRUNK_RAD 0.11*SCALE
#define HUMAN_TRUNK_LEN 0.2*SCALE
// TRUNK&HEAD
trunk_body = dBodyCreate (world);
trunk_geom[0] = dCreateCapsule (human_space,HUMAN_TRUNK_RAD,HUMAN_TRUNK_LEN);
dGeomSetBody(trunk_geom[0],trunk_body);
dBodySetPosition(trunk_body,HUMAN_LEG_DISTANCE/2,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_LENGTH+(HUMAN_TRUNK_LEN/2)+0.25*SCALE);
head_body = dBodyCreate (world);
head_geom = dCreateSphere (human_space,HUMAN_HEAD_RAD);
dGeomSetBody(head_geom,head_body);
dBodySetPosition(head_body,HUMAN_LEG_DISTANCE/2,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_LENGTH+HUMAN_TRUNK_LEN+HUMAN_HEAD_RAD+0.35*SCALE);
hLeg_R_joint[2] = dJointCreateHinge( world, 0 );
dJointAttach( hLeg_R_joint[2], hLeg_R_body[2], trunk_body );
dJointSetHingeAnchor(hLeg_R_joint[2],HUMAN_LEG_DISTANCE,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_LENGTH+0.2*SCALE);
dJointSetHingeParam(hLeg_R_joint[2], dParamLoStop, -0.2 * M_PI);
dJointSetHingeParam(hLeg_R_joint[2], dParamHiStop, 0.65 * M_PI);
hLeg_L_joint[2] = dJointCreateHinge( world, 0 );
dJointAttach( hLeg_L_joint[2], hLeg_L_body[2], trunk_body );
dJointSetHingeAnchor(hLeg_L_joint[2],0,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_LENGTH+0.2*SCALE);
dJointSetHingeParam(hLeg_L_joint[2], dParamLoStop, -0.2 * M_PI);
dJointSetHingeParam(hLeg_L_joint[2], dParamHiStop, 0.65 * M_PI);
head_joint = dJointCreateHinge( world, 0 );
dJointAttach( head_joint, trunk_body, head_body );
dJointSetHingeAnchor(head_joint,0,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_LENGTH+HUMAN_TRUNK_LEN+0.07*SCALE);
dJointSetHingeParam(head_joint, dParamLoStop, 0 * M_PI);
dJointSetHingeParam(head_joint, dParamHiStop, 0 * M_PI);
#define HUMAN_ARM_RAD 0.035*SCALE
#define HUMAN_ARM_LEN 0.15*SCALE
#define HUMAN_ARM2_LEN 0.15*SCALE
#define HUMAN_HAND_RAD 0.05*SCALE
// R Arm
hArm_R_body[0] = dBodyCreate (world);
hArm_R_geom[0][0] = dCreateCapsule (human_space,HUMAN_ARM_RAD,HUMAN_ARM_LEN);
dGeomSetBody(hArm_R_geom[0][0],hArm_R_body[0]);
dBodySetPosition(hArm_R_body[0],HUMAN_TRUNK_RAD+0.13*SCALE,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_LENGTH+HUMAN_TRUNK_LEN+0.15*SCALE);
hArm_R_body[1] = dBodyCreate (world);
hArm_R_geom[1][0] = dCreateCapsule (human_space,HUMAN_ARM_RAD,HUMAN_ARM2_LEN);
dGeomSetBody(hArm_R_geom[1][0],hArm_R_body[0]);
dBodySetPosition(hArm_R_body[1],HUMAN_TRUNK_RAD+0.13*SCALE,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_LENGTH+HUMAN_TRUNK_LEN-HUMAN_ARM_LEN+0.15*SCALE);
hArm_R_joint[0] = dJointCreateBall( world, 0 );
dJointAttach( hArm_R_joint[0], trunk_body, hArm_R_body[0] );
dJointSetBallAnchor(hArm_R_joint[0],HUMAN_TRUNK_RAD+0.1*SCALE,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_LENGTH+HUMAN_TRUNK_LEN+0.27*SCALE);
dJointSetBallParam(hArm_R_joint[0], dParamLoStop, 0 * M_PI);
dJointSetBallParam(hArm_R_joint[0], dParamHiStop, 0 * M_PI);
hArm_R_joint[1] = dJointCreateHinge( world, 0 );
dJointAttach( hArm_R_joint[1], hArm_R_body[1], hArm_R_body[0] );
dJointSetHingeAnchor(hArm_R_joint[1],HUMAN_TRUNK_RAD+0.13*SCALE,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_LENGTH+HUMAN_TRUNK_LEN-HUMAN_ARM_LEN+0.23*SCALE);
dJointSetHingeParam(hArm_R_joint[1], dParamLoStop, -0.2 * M_PI);
dJointSetHingeParam(hArm_R_joint[1], dParamHiStop, 0.65 * M_PI);
hHand_R_body = dBodyCreate (world);
hHand_R_geom = dCreateSphere (human_space,HUMAN_HAND_RAD);
dGeomSetBody(hHand_R_geom,hHand_R_body);
dBodySetPosition(hHand_R_body,HUMAN_TRUNK_RAD+0.13*SCALE,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_BASE_Z+HUMAN_LEG_SHANK_Z+HUMAN_LEG_THIGH_Z/2+0.15*SCALE);
hHand_R_joint = dJointCreateHinge( world, 0 );
dJointAttach( hHand_R_joint, hHand_R_body, hArm_R_body[1] );
dJointSetHingeAnchor(hHand_R_joint,HUMAN_TRUNK_RAD+0.13*SCALE,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_BASE_Z+HUMAN_LEG_SHANK_Z+HUMAN_LEG_THIGH_Z/2+0.15*SCALE);
dJointSetHingeParam(hHand_R_joint, dParamLoStop, 0 * M_PI);
dJointSetHingeParam(hHand_R_joint, dParamHiStop, 0 * M_PI);
// L Arm
hArm_L_body[0] = dBodyCreate (world);
hArm_L_geom[0][0] = dCreateCapsule (human_space,HUMAN_ARM_RAD,HUMAN_ARM_LEN);
dGeomSetBody(hArm_L_geom[0][0],hArm_L_body[0]);
dBodySetPosition(hArm_L_body[0],-0.095*SCALE,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_LENGTH+HUMAN_TRUNK_LEN+0.15*SCALE);
hArm_L_body[1] = dBodyCreate (world);
hArm_L_geom[1][0] = dCreateCapsule (human_space,HUMAN_ARM_RAD,HUMAN_ARM2_LEN);
dGeomSetBody(hArm_L_geom[1][0],hArm_L_body[0]);
dBodySetPosition(hArm_L_body[1],-0.095*SCALE,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_LENGTH+HUMAN_TRUNK_LEN-HUMAN_ARM_LEN+0.15*SCALE);
hArm_L_joint[0] = dJointCreateBall( world, 0 );
dJointAttach( hArm_L_joint[0], trunk_body, hArm_L_body[0] );
dJointSetBallAnchor(hArm_L_joint[0],-0.075*SCALE,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_LENGTH+HUMAN_TRUNK_LEN+0.27*SCALE);
dJointSetBallParam(hArm_L_joint[0], dParamLoStop, 0 * M_PI);
dJointSetBallParam(hArm_L_joint[0], dParamHiStop, 0 * M_PI);
hArm_L_joint[1] = dJointCreateHinge( world, 0 );
dJointAttach( hArm_L_joint[1], hArm_L_body[1], hArm_L_body[0] );
dJointSetHingeAnchor(hArm_L_joint[1],-0.095*SCALE,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_LENGTH+HUMAN_TRUNK_LEN-HUMAN_ARM_LEN+0.23*SCALE);
dJointSetHingeParam(hArm_L_joint[1], dParamLoStop, -0.2 * M_PI);
dJointSetHingeParam(hArm_L_joint[1], dParamHiStop, 0.65 * M_PI);
hHand_L_body = dBodyCreate (world);
hHand_L_geom = dCreateSphere (human_space,HUMAN_HAND_RAD);
dGeomSetBody(hHand_L_geom,hHand_L_body);
dBodySetPosition(hHand_L_body,-0.095*SCALE,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_BASE_Z+HUMAN_LEG_SHANK_Z+HUMAN_LEG_THIGH_Z/2+0.15*SCALE);
hHand_L_joint = dJointCreateHinge( world, 0 );
dJointAttach( hHand_L_joint, hHand_L_body, hArm_L_body[1] );
dJointSetHingeAnchor(hHand_L_joint,-0.095*SCALE*SCALE,-HUMAN_LEG_BASE_Y/4,HUMAN_LEG_BASE_Z+HUMAN_LEG_SHANK_Z+HUMAN_LEG_THIGH_Z/2+0.15*SCALE);
dJointSetHingeParam(hHand_L_joint, dParamLoStop, 0 * M_PI);
dJointSetHingeParam(hHand_L_joint, dParamHiStop, 0 * M_PI);
}
#endif#ifdef HUMAN
// DRAW R LEG
{
dVector3 v3;
dGeomBoxGetLengths (hLeg_R_geom[0][0], v3);
dsDrawBox(
dBodyGetPosition(hLeg_R_body[0]),
dBodyGetRotation(hLeg_R_body[0]),
v3
);
}
for(int i=1;i<3;i++)
{
dReal rad,len;
dGeomCapsuleGetParams (hLeg_R_geom[i][0], &rad,&len);
dsDrawCapsule(
dBodyGetPosition(hLeg_R_body[i]),
dBodyGetRotation(hLeg_R_body[i]),
len,rad
);
}
for(i=0;i<3;i++){
dVector3 v3;
dMatrix3 R1;
dRSetIdentity(R1);
dJointGetHingeAnchor(hLeg_L_joint[i], v3);
dsDrawSphere(v3, R1, 0.05*SCALE);
}
// DRAW L LEG
{
dVector3 v3;
dGeomBoxGetLengths (hLeg_L_geom[0][0], v3);
dsDrawBox(
dBodyGetPosition(hLeg_L_body[0]),
dBodyGetRotation(hLeg_L_body[0]),
v3
);
}
for(int i=1;i<3;i++)
{
dReal rad,len;
dGeomCapsuleGetParams (hLeg_L_geom[i][0], &rad,&len);
dsDrawCapsule(
dBodyGetPosition(hLeg_L_body[i]),
dBodyGetRotation(hLeg_L_body[i]),
len,rad
);
}
for(i=0;i<3;i++){
dVector3 v3;
dMatrix3 R1;
dRSetIdentity(R1);
dJointGetHingeAnchor(hLeg_R_joint[i], v3);
dsDrawSphere(v3, R1, 0.05*SCALE);
}
//DRAW TRUNK
{
dReal rad,len;
dGeomCapsuleGetParams (trunk_geom[0], &rad,&len);
dsDrawCapsule(
dBodyGetPosition(trunk_body),
dBodyGetRotation(trunk_body),
len,rad
);
dsDrawSphere (dBodyGetPosition(head_body),dBodyGetRotation(head_body),
HUMAN_HEAD_RAD);
}
//DRAW ARM
for(int i=0;i<2;i++)
{
dReal rad,len;
dGeomCapsuleGetParams (hArm_R_geom[i][0], &rad,&len);
dsDrawCapsule(
dBodyGetPosition(hArm_R_body[i]),
dBodyGetRotation(hArm_R_body[i]),
len,rad
);
dGeomCapsuleGetParams (hArm_L_geom[i][0], &rad,&len);
dsDrawCapsule(
dBodyGetPosition(hArm_L_body[i]),
dBodyGetRotation(hArm_L_body[i]),
len,rad
);
}
//DRAW HAND
{
dsDrawSphere(
dBodyGetPosition(hHand_R_body),
dBodyGetRotation(hHand_R_body),
dGeomSphereGetRadius (hHand_R_geom)
);
dsDrawSphere(
dBodyGetPosition(hHand_L_body),
dBodyGetRotation(hHand_L_body),
dGeomSphereGetRadius (hHand_L_geom)
);
}
for(i=0;i<2;i++){
dVector3 v3;
dMatrix3 R1;
dRSetIdentity(R1);
float rad=0.0f;
if(i==0){
rad = 0.07*SCALE;
dJointGetBallAnchor(hArm_R_joint[i], v3);
}
else {
rad = 0.04*SCALE;
dJointGetHingeAnchor(hArm_R_joint[i], v3);
}
dsDrawSphere(v3, R1, rad);
if(i==0){
rad = 0.07*SCALE;
dJointGetBallAnchor(hArm_L_joint[i], v3);
}
else {
dJointGetHingeAnchor(hArm_L_joint[i], v3);
rad = 0.04*SCALE;
}
dsDrawSphere(v3, R1, rad);
}
#endif HUMAN