新規作成
新規ページ作成
新規ページ作成(その他)
このページをコピーして新規ページ作成
このウィキ内の別ページをコピーして新規ページ作成
このページの子ページを作成
新規ウィキ作成
編集
ページ編集
ページ編集(簡易版)
ページ名変更
メニュー非表示でページ編集
ページの閲覧/編集権限変更
ページの編集モード変更
このページにファイルをアップロード
メニューを編集
バージョン管理
最新版変更点(差分)
編集履歴(バックアップ)
アップロードファイル履歴
このページの操作履歴
このウィキのページ操作履歴
ページ一覧
ページ一覧
このウィキのタグ一覧
このウィキのタグ(更新順)
このページの全コメント一覧
このウィキの全コメント一覧
おまかせページ移動
掲示板
このウィキのスレッド一覧
このページのスレッド一覧
RSS
このウィキの更新情報RSS
このウィキ新着ページRSS
ヘルプ
ご利用ガイド
Wiki初心者向けガイド(基本操作)
このウィキの管理者に連絡
運営会社に連絡(不具合、障害など)
掲示板
ページ検索
メニュー
科学のおもちゃ箱 @wiki
操作ガイド
新規作成
編集する
全ページ一覧
掲示板
登録/ログイン
科学のおもちゃ箱 @wiki
操作ガイド
新規作成
編集する
全ページ一覧
掲示板
登録/ログイン
ページ一覧
科学のおもちゃ箱 @wiki
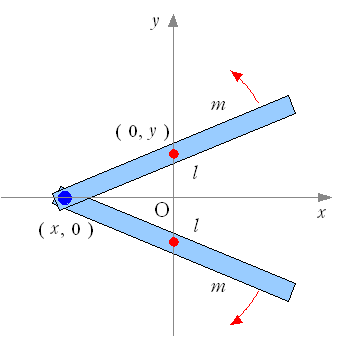
【解答】回転軸連結された2本の棒
【解答】回転軸連結された2本の棒
外力がないから,全体の重心は静止したままである。重心を原点とし,図のように座標軸をとるとき,左回転する棒の重心(中心)の座標を
,棒の連結軸の座標を
とおく。このときの回転角を
とすると,
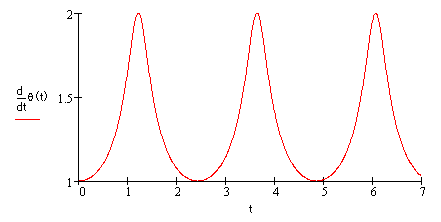
系のラグランジアンは,
となる。微分すると,
となり,運動方程式
を得る。数値積分して,角速度の変化をプロットすると下のようになった。
Algodoo のシーン
http://www14.atwiki.jp/yokkun?cmd=upload&act=open&pageid=201&file=Arms02.phz
タグ:
+ タグ編集
タグ:
タグの更新に失敗しました
エラーが発生しました。ページを更新してください。
ページを更新
いいね!
「【解答】回転軸連結された2本の棒」をウィキ内検索
最終更新:2009年11月22日 22:18
添付ファイル
Arms02.phz
メニュー
トップページ
Index(日付順)
Index(内容別)
2011年のページ
2010年のページ
2009年のページ
2008年のページ
プラグイン紹介
まとめサイト作成支援ツール
メニュー
メニュー2
更新履歴
取得中です。
ここを編集