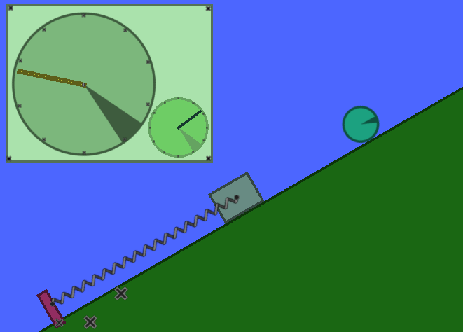
斜面上のばねによる打ち上げ
『Phun』のばね定数の検証に用いた問題。
傾き角

のなめらかな斜面上に,上端に質量

のおもりをつけたばね定数

のばねの下端を固定し,自然長より

だけ縮めた状態でおもりに接して質量

の小球をのせて手で押さえる。手を離した後の小球とおもりの運動を考察する。
小球がおもりに接している間について,おもりと小球が押し合う抗力を

,両者の初期位置を原点とした変位を斜面上方を正として

とおくと,両者の運動方程式は加速度を

として,


したがって,

となる。運動は,振幅

,角速度

として,つりあい位置から下向きに

で表される単振動となる。
※ シミュレーション設定


となるのは

のとき,すなわちばねが自然長にもどったときに小球はおもりから離れ始める。また,このときまでの手を離してからの時間経過

は,初期位相0として位相角

,振幅

とおけば,


※ (理論値→シミュレーション実測値) 以下同様。
から得られる。
また,このときの速さは

となる。もちろん,これはエネルギー保存

から得ることもできる。
その後おもりは,周期が

の単振動をする。その振幅を

とすると,

が成立するから,

したがって,おもりの最高点は

である。
一方,小球は斜面を上方へすべっていき,Uターンしてくる。初期位置から最高点までの距離を

とすると,エネルギー保存により

となる。また,小球がおもりから離れてから最高点に達するまでの時間経過

は,

また,最初からの時間経過は

となる。
おもりが最高点から2回振動した時間を測定
以上の考察で気づいたことは,『Phun』が理論的な解析のプロセスにおいて,見落としや計算違いがないかどうかチェックするための有効なシミュレータになるということである。実際,シミュレーションからの理論値のずれがむしろ勘違いや計算ミスをみつけることにつながった点が今回の考察で多々あった。
『Phun』によるシミュレーション
最終更新:2009年03月23日 22:22

