相対運動方程式の3つの解釈
相対運動と換算質量ですでに述べた相対運動の方程式について,3つの解釈が成り立つことを整理した。
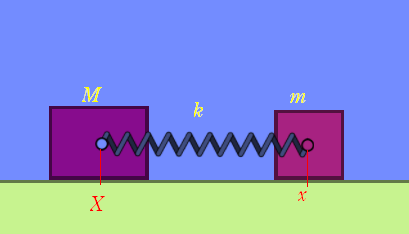
質量

の質点が自然長

,ばね定数

のばねの両端についていて,なめらかな水平面をすべっているとしよう。それぞれの座標を

とすると運動方程式は,
となる。2つの座標が混在した連立微分方程式になっている。両辺を質量で割って辺々引くと,
これが相対座標の運動方程式である。この右辺の第2因子の逆数が換算質量

すなわち,
であった。
なお,はじめの2つを辺々加えると重心運動の方程式を得る。
一方,はじめから重心とともに動く座標系で運動方程式をたててみよう。
ここで,質量中心系(重心系,慣性中心系,C系などとも呼ぶ)における両者の座標を実験室系のものに書き戻すと,
これらを代入すると,2つの運動方程式がいずれも相対運動の方程式になることがわかる。
したがって,相対運動の方程式は質量中心系でみた運動方程式なのである。これを相対変位で表現すると最初につくった形になるわけだが,その副作用が換算質量になったと理解できそうだ。換算質量は,本来何の運動実体(?)も対象としていない仮想上の概念であるから,いわば形式上の便宜といえる。でも,相対座標を使う限りいつでも換算質量を使えば運動方程式やエネルギー積分を簡単に書けるので,とても便利なものであるといえる。
一方,

からみた

の運動方程式を直接たてると,
両辺に

を付け加えただけだが,右辺第2項は
が加速度運動しているために,
には慣性力が働くように見えるということを示している。これに
の運動方程式から

を代入してやれば,同じ結果を得る。
整理すると,相対運動の方程式は次の3つの解釈ができる。
(1) 換算質量が相対変位をその変位とするような仮想上の運動方程式
(2) 質量中心系からみた運動方程式
(3) 一方から他方をみた慣性力を含む運動方程式
最終更新:2009年12月06日 13:10
