正方形枠の回転2
鉛直面内に立てて,重力を考慮する。ひとまず,姿勢保持に必要なトルクの導出を考えてみたい。
重力を考慮した系のラグランジアンは,
となる。ラグランジュ方程式をつくり,2階微分について解いて整理すると
を得る。
まず手始めに,角

への姿勢保持において,左下の固定回転軸まわりに必要なトルクを求めてみる。

とおいて,
となる。これを

について解けば,
を得る。
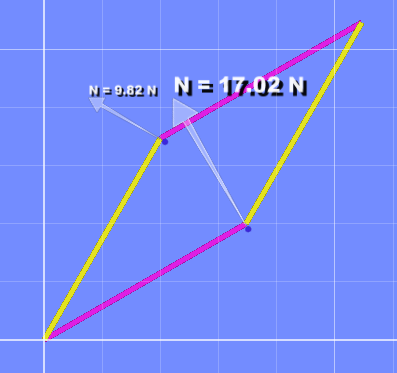
Algodoo の設定は,

である。Algodooのモーターの強制停止時トルクでは静止させられなかったので,静止させるための支点を与えて力を見ることにした。
こうして見ると,姿勢保持に要するトルクを求めるのにラグランジアンから導くのは全く大げさで,初歩的な剛体のつりあいを考えれば十分である。ラグランジアンの強みは,運動にこそある。しかし,ラグランジュの方法が,束縛における「
仮想仕事の原理」をその手法として内に含んでいるということをあらためて学んだ例となった。
Algodoo シーン
最終更新:2010年01月10日 18:37
