運動座標系による運動方程式(1)
最も一般的な運動座標系における運動方程式の記述について整理してみた。
OKWaveのQ&Aにヒントを得て。
(1) 数学的準備
慣性系Sに対して並進および回転をしている運動座標系S' において,運動方程式がどう記述されるかを整理する。S系で記述されたベクトル

に対する,S'系の表現を

とする。ベクトルそのものは,唯一の空間に浮かぶ同一の矢印であることに変わりはないから,
である。この表現の意味するところは,S系の基底
![[\boldsymbol{e}_x,\boldsymbol{e}_y,\boldsymbol{e}_z]](http://chart.apis.google.com/chart?cht=tx&chf=bg,s,ffffff00&chco=000000ff&chs=25&chl=%5B%5Cboldsymbol%7Be%7D_x%2C%5Cboldsymbol%7Be%7D_y%2C%5Cboldsymbol%7Be%7D_z%5D)
およびS'系の基底
![[\boldsymbol{e}_x^\prime,\boldsymbol{e}_y^\prime,\boldsymbol{e}_z^\prime]](http://chart.apis.google.com/chart?cht=tx&chf=bg,s,ffffff00&chco=000000ff&chs=25&chl=%5B%5Cboldsymbol%7Be%7D_x%5E%5Cprime%2C%5Cboldsymbol%7Be%7D_y%5E%5Cprime%2C%5Cboldsymbol%7Be%7D_z%5E%5Cprime%5D)
として,それぞれによる表現が

および

となること,すなわち
を示しているのである。
さて,運動方程式の成立は慣性系における観測が前提である。しかし,場合によって加速系による表現が要求されるから,慣性系で立てた運動方程式を加速系の表現に書き直す必要が出てくる。その一般的表現を得ようというのが,今回の目的だ。
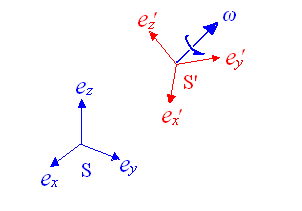
ポイントは,加速系S' においては基底
自体が,S系の基底に対して時々刻々とその関係を変えていく,という点にある。たとえば,ある瞬間にS'系がS系の表現で

の角速度をもって回転しているとき,ベクトル
の時間微分は,
としなければならない。さて,いちいち成分表示をしていたのでは混乱のきわみである。そこで,上の事情を表現するために
を用いることにする。上は,S'系から素直に見たベクトル
の時間変化率を示し,下は基底自体の回転による「補正」を意味する。すなわち,任意のベクトルのS'系表示
に対して,その時間微分は
と書ける。この表式は,
をのぞいて,S'系による表現として「閉じて」いる。これを慣性系から加速系へと乗り換えるときの基本公式として用いる。蛇足ながら注意を喚起しておくが,演算子

は,プライムのついた(S'系で表現された)ベクトルに対しての作用においてのみ意味をもつ。
余談になるが,ここまで書いて上の公式が,リーマン幾何学の共変微分
に似ていることに気づいた。一般リーマン空間におけるベクトルの座標微分と加速系におけるベクトルの時間微分という違いはあるが,そこに数学的類似性が横たわっており,ある意味
は「接続係数」

に当たるといってよいかもしれない。
参考:ディラック「一般相対性理論」を読む
最終更新:2012年01月17日 22:48
