運動座標系のシステマティックな導出(2)
3次元極座標系への応用を検討する。
3次元極座標
まず,座標変換
を微分して,
すなわち,
$$\left(\begin{array}{ccc}dx\\dy\\dz\end{array}\right) = \left(\begin{array}{ccc}\sin\theta\cos\phi \qquad \cos\theta\cos\phi \quad -\sin\phi\\ \sin\theta\sin\phi \qquad \cos\theta\sin\phi \qquad \cos\phi \\ \cos\theta \qquad\quad -\sin\theta \qquad\qquad 0\end{array}\right)
\left(\begin{array}{lll}dr\\rd\theta\\r\sin\theta d\phi\end{array}\right)$$
ここで,
であるから,
これが,ベクトル成分の変換ということになる。左辺は左手系に移っているから,

には反転が含まれることに留意したい。
次に基底の時間微分だが,
を微分して,
によって導出できる。ただし,

は
の転置である。しかし,この計算はかなり煩雑になる。そこで,微小回転

による基底の変化を,直接調べてみよう。
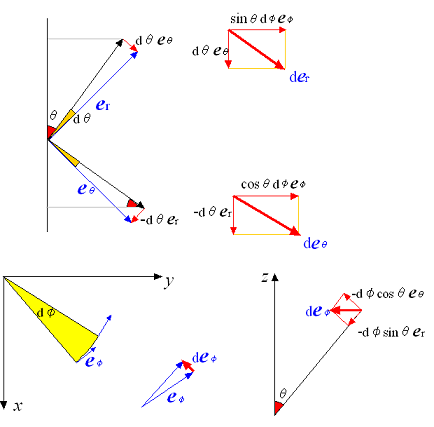
結果は,
したがって,
時間微分すると,速度
を得,さらにもう一度微分すると,加速度
を得る。
最終更新:2018年10月26日 16:06
