運動座標系のシステマティックな導出(3)
回転の角速度ベクトル

を用いた,速度・加速度の導出。
と書ける。ここで,
は,

を基底とする運動座標系における成分値のみの時間変化率を表し,また
は基底自体の回転による「補正」を意味する。
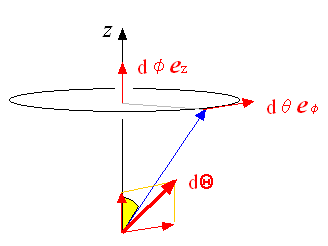
3次元極座標系の微小回転角を

とすると,
となる。したがって,運動による座標系の回転の角速度ベクトルは,
と書ける。すると,速度は
また,加速度も
によって,目的の結果を得る。
さて,基底の時間微分
が,

と深い関係があることは,容易に推察できる。実は,上の反対称行列をベクトルにかけると,
とのベクトル積(の符号を変えたもの)に等しくなる。
これは,この反対称行列が
のいわゆる「双対テンソル」(軸性ベクトルの反対称テンソル表現)になっていることを示しているのである。
対称性が見えやすいように,

に対して1,2,3の添え字を当てれば,
のとき,
となる。これで
を求めれば,基底の時間微分は自動的に導出できることがわかった。
最終更新:2010年04月18日 21:50
