小球と木片の無限回衝突(e<1)
小球と木片の無限回衝突において,はねかえり定数が

の一般の場合について考える。再度の衝突前に木片が停止する場合は簡単で,はねかえり定数
を考慮して先の考察に多少の手を加えるだけでよい。
初めの衝突直後の小球と木片の速さを

とすると,はねかえり定数が
だから,

運動量保存により

両式から

を得る。
さて,

の初速で動き始めた木片が摩擦力によって減速し,再度の衝突前に停止すると仮定して,停止までの時間を

とすると,

もし,木片が停止する前に小球が再度衝突するのであれば,再衝突までの時間を

とすると,

となる。したがって,

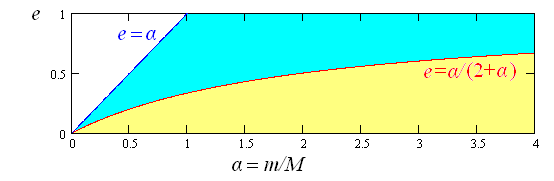
の各場合にわけて検討しなければならない。すなわち,

として
(1)

のとき,木片は衝突前に停止する。
(2)

のとき,木片が停止しないうちに次の衝突が起こる。
なお,繰り返し衝突が起こるために

すなわち

でなければならないことはいうまでもない。
(2)の解析はなかなか根気のいる仕事であり,ひとまず宿題としたい。
(1)は,先の
小球と木片の無限回衝突と同様の考察に対して,はねかえり定数
を考慮すればよい。
はじめの衝突から再衝突までの時間を

とすると,

を得る。2回の衝突位置間の距離は,

となる。
以下
小球と木片の無限回衝突と同様にして,

とおけば,最初の衝突から両者がともに静止するまでの時間

と移動距離

は,


となる。
『Phun』によるシミュレーション

で,木片の停止と衝突がほぼ同時に起こる条件を選んでみた。
同時性をわかりやすくするために,木片の動摩擦係数を小さくし,さらにスローモーションにした。
上の条件は,『Phun』においておおよその設定しかできない上に誤差もあるから,衝突よりも木片の停止がやや早くなっている。
最終更新:2009年03月14日 13:46
