極座標による微分導出への回転の活用(1)
極座標によるスカラー場やベクトル場の微分演算(勾配・発散・回転等)の導出方法はいろいろあるが,いずれもなかなか骨の折れるシロモノ。運動座標系における「回転」を用いる方法を思いついた。
と書ける。ここで,
は,

を基底とする運動座標系における成分値のみの時間変化率を表し,また
は基底自体の回転による「補正」を意味する。
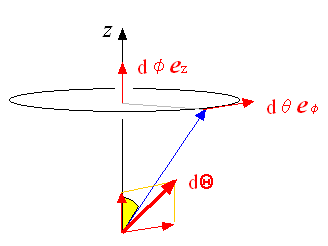
3次元極座標系の微小回転角を

とすると,
となる。したがって,運動による座標系の回転の角速度ベクトルは,
と書ける。
さて,最初に与えたベクトル

の時間微分の表式において,「分母」の

を除いた全微分形式を考える。
この微分形式を時間微分のみに限定するのはもったいない。座標微分にも使ってしまおうという魂胆である。
そこで,準備として微分演算子

から「分子」の

をはずしたモノを考え,

と書くことにする。

をひっくり返した
にならって

をひっくり返したかったが,wiki版Texにその機能がみつからないので,

の意味を込めて
とした。おそらく同義の定義および表記法はどこかで確立されているだろうが,私は知らないので自前で調達したというわけだ。
たとえばベクトル場
の発散は,
と書けることになる。

が
の方に引っ越したわけだ。
であるから,形式的に
となる。こうして微分形式になりかわった

に,
を用いればよいことになる。
以上を
とともに代入して整理すると,
あるいは,お好みであれば
を得る。以上の計算で,

として,
ただし,
を用いた。
最終更新:2010年10月13日 15:20
