現在編集中
このページではヘリコプターの作り方について解説する。
はじめに
ここで作るヘリコプターは「スワッシュプレート」による空力制御のヘリコプターになります。
ビシージで製作する最も簡単で制御できるヘリコプターはドローンのようなクワッドコプター形状か、二重反転ローター、またはSide/Side機に反トルク制御を搭載したものです。
でも、どうせ作るのでしたら現実と同じ空力制御のヘリコプターを作ってみたくなるものです。
製作するにあたって、初めに前提となる知識を先に述べさせていただき、その後に作り方を記載していきます。
前提知識
ヘリコプターは「機械仕掛けの神」と言われる程度には、複雑な機械構造と航空・物理理論に基づいており、普段耳慣れない専門用語をぽんぽん出さずに説明することは難しいです。
そのため、初めに専門用語と専門知識のうち重要と思われる一部をご紹介いたします。ふんわりとした記載になりますので、より詳しく知りたい方は専門書を紐解いて頂きたいと思います。ついでに追記・修正して下されば助かります。
|
+
|
... |
スワッシュプレート
スワッシュプレートとは、ヘリコプターなどの回転翼機のローリング・ピッチング・揚力の増減を制御する重要な機構です。
構造としては「図のように4方向に傾き、かつ上下に動く板(アウターリング)」と、その上に載った「回転する板(インナーリング)」の2枚から出来ています。
本質的には回転翼のプロペラ「ブレード」の迎え角を変化させる仕組みですが、重要なのは「迎え角の変化を周期的に行える」ことです。
サイクリックコントロール
「迎え角の変化を周期的に行える」と上項で書きましたが、これを「サイクリックコントロール」と呼びます。
その仕掛けは次の順序で動作します。
- スワッシュプレートを傾ける。
- スワッシュプレートの傾きが、「リンクロッド」でブレードに伝わって迎え角が変化する。
何故これが必要なのかといえば、飛行機でいうエルロンやエレベーターの機能、すなわちローリングとピッチングを回転する翼で行うためです。
右ロールを行う場合を飛行機と比較した図を見て頂ければ、直感的にご理解いただけるかと思います。
なお、この図は正しくありません。
何故かといえば後述する「ジャイロスコピックプリセッション(GyrSco-Pri)」という物理現象があるためです。
コレクティブコントロール
スワッシュプレートの「傾き」がサイクリックコントロールに必要なことは前述の通りです。
それに対して「上下に動く」動作は何に必要なのかというと、「コレクティブコントロール」を行うためです。
コレクティブコントロールは「全てのブレードの迎え角を一様に変化させる」制御で、「垂直上昇/垂直下降」、「水平飛行時の推力調整」のために使います。
「垂直上昇/垂直下降」については特に疑問はないかと思いますので、「水平飛行時の推力調整」について記述します。
例として、ホバリングしているヘリコプターがあるとします。
この状態は「機体の重さをローターの推力100%を使って持ち上げて支えている状況」と言い換えることが出来ます。
ヘリコプターは前傾姿勢をとることで前進するのですが、この状態のまま前進するとどういったことが起こるのでしょうか?
結論から申し上げますと、前進するにしたがって下降していきます。
何故なら図に示すように、機体を支えている力のいくらかを前進させる力に割り当ててしまうからです。
下降せず水平飛行をするためには、推力を増すことで解決しなければなりません。
その方法がコレクティブコントロールなのです。
※飛行機でイメージするなら主翼の揚力が足りていない状態。
※逆に降下しながら前進するには推力を減らしてやればよいともいえる。

ジャイロスコピックプリセッション(GyrSco-Pri)
前出の図が間違っていることは先にお伝えした通りで、正しくは次の図のようになります。
直感に反して90度ズレた位置で揚力が増加しているのは「ジャイロスコピックプリセッション」という物理現象があるためです。
この物理現象の詳細については物理学の教科書を紐解いて頂くこととし、ここではこのようなズレが生じるということを把握してください。
なお、ビシージでは機体によって90度より小さくなり、ほぼ0度に近くなることもあります。(※要検証)
全関節型ローターヘッドシステム
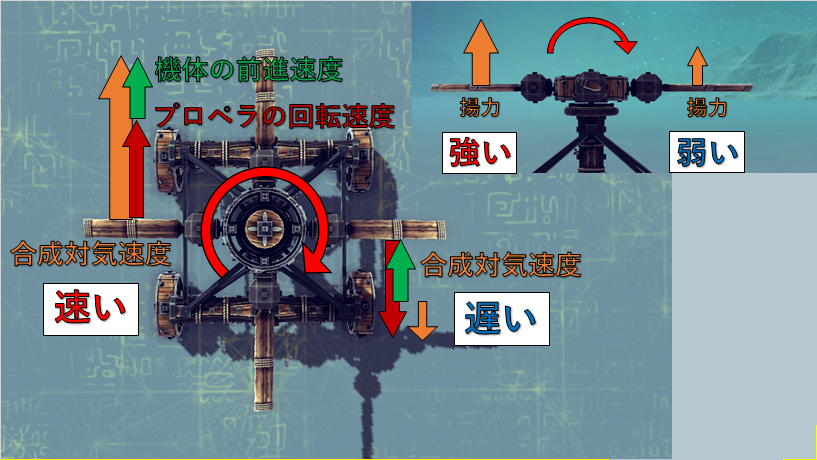
ヘリコプター(ローター)が前進するとき、ローターの左右で揚力の不均衡が発生します。それは機体の前進方向に向かうプロペラと反対方向に向かうプロペラで合成揚力が異なるからです。
この問題を解決するのが全関節型ローターヘッドシステムで、フラッピングヒンジ、リード・ラグヒンジ、フェザリングヒンジの3つのヒンジを持っています。

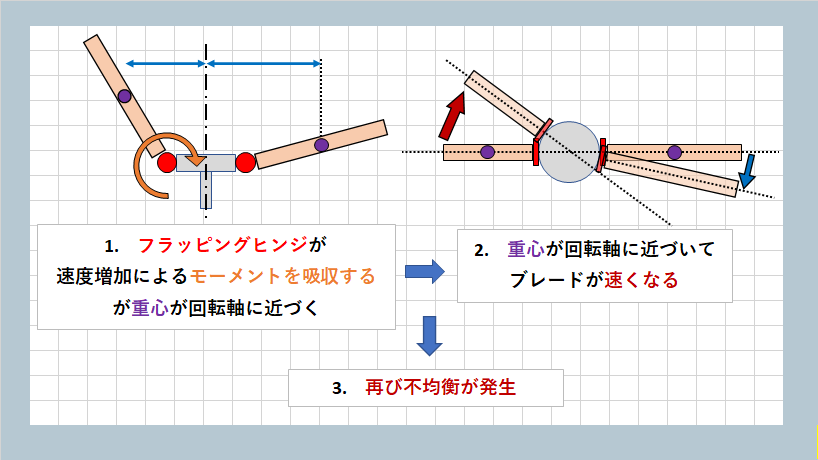
フラッピングヒンジ
回転面に対して上下に動くヒンジで、前進側のブレードを上方にはね上げることで揚力の不均衡を解消させるヒンジです。
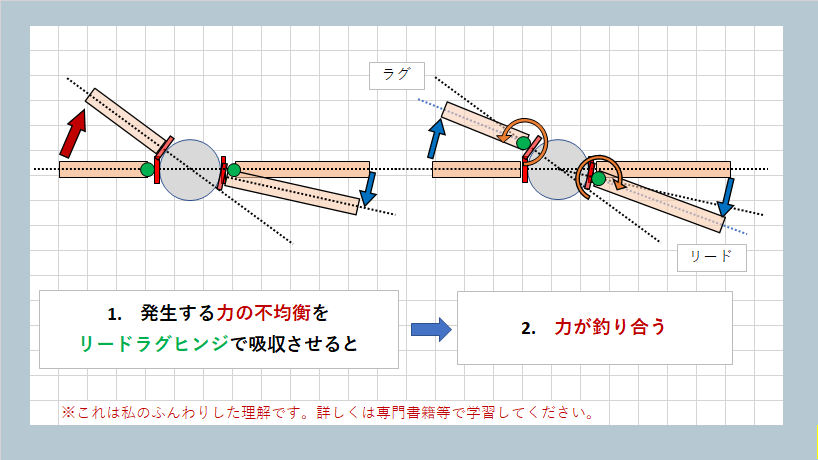
リード・ラグヒンジ
前述のフラッピングヒンジにより揚力不均衡が解消されるのですが、今度はブレードが跳ね上がることでコリオリ力が発生してしまいます。これによってまた発生する不均衡を解消するため、前後方向にブレードを動かすのがリード・ラグヒンジです。
フェザリングヒンジ
フェザリングヒンジはブレードの迎え角を操作するヒンジで、リンクロッドを通してスワッシュプレートに接続されています。
|
作り方
さて、長々と前提知識を述べて参りましたがいよいよ作成していきましょう。作成に当たってMODのABSを導入することを強く推奨いたします。製作・開発のしやすさが段違いです。
といいつつ現在編集中。
調整のヒント・トラブルシューティング
製作は自体は上記「作り方」を参考にしていただければ、おおよそヘリコプターの作成は可能かと思います。しかし、ビシージでのマシン製作に付き物の調整作業があります。ヘリコプター作成時に見られる代表的調整事項を症状ごとに記載しますので参考にしてください。
|
+
|
... |
めちゃくちゃな飛び方をする(制御不能)
プロペラパーツが均一に配置されていないことが原因と考えられます。
- プロペラパーツの角度が全て同じか確認してください
- ローター回転軸からプロペラパーツまでの距離が均一か確認してください
まっすぐ飛ばない(ロールする)
重量モーメントがアンバランスになっているか、揚力の不均衡が原因と考えられます。
手順1.左右の重量モーメントバランスを検証する
- メインローターの自動回転設定の速度を0にします
- ブレード関連のパーツを脇へ移動させます(機体のモーメントバランスをみるため奇数枚のブレードなら特に推奨)
- ローター回転軸の直下にヒンジを設置してピン固定し、機体左右に振れるシーソーを作ります
- どちらかにすぐ傾くなら、パーツの配置位置、バラストの重量などを確認してバランスが取れる配置にしてください
手順2.揚力の不均衡を解消する
前提として手順1.で重量モーメントバランスが取れていることを確認してください。
A.二重反転ローター
- 上面のブレードの迎え角を小さく調整してみてください
B.全関節ローター
(い)ブレード前進方向の揚力が強くてロールする
- フラッピングヒンジの稼働自由度を上げる調整を試してください
- ブレード(プロペラパーツ)そのものをフラッピング上方向に回転させ、上反角を大きくする調整を試してみてください
(ろ)ブレード後退方向の揚力が強くてロールする
- フラッピングヒンジの自由度を下げる調整を試してみてください
- ブレード(プロペラパーツ)そのものをフラッピング下方向に回転させる、上反角を小さくする調整を試してみてください
C.無関節ローター
- ブレードに上反角を付ける
- ブレード後退角を付ける
機首上げ傾向が強い
原因として、上反角が大きすぎることが考えられます。上反角が付き過ぎていることで機体前進時に前方にあるブレードの揚力が増加、機首上げに繋がっています。 無関節型ローターを採用した場合に比較的起こりやすい症状です。
テールローターで旋回するとバランスを崩す
テールローターの推力中心が機体の重心軸から外れていることが原因です。
- MOD「ABS」で重心軸を表示させる。
- テールローターの推力中心を重心軸上に配置する
うまくホバリングできない
前後方向及び左右方向の重量モーメントがアンバランスになっているか、推力コーンの形成がうまく出来ていない可能性があります。
検証1.重量モーメントバランスを検証する
手順は前述の「左右の重量モーメントバランスを検証する」と同様です
ただし、今回は前後に傾くシーソーでも検証します
検証2.推力コーンが形成されているか確認する
- ホバリング中にブレードが逆「ハ」の字になっているか確認してください
- ブレードが逆「ハ」の字になるよう調整を試してみてください
- ただし角度がつき過ぎていると別の問題を引き起こすので注意が必要。5~10度程度の上反角がついているのが理想的と考えられます。
検証3.己の操縦技術を疑う
- 大変申し上げ辛いのですが。。。検証してみてください。
爆散する
ヘリコプターに限らず起こる事故です。時に作り直した方が解決が早いかもしれません。
- パーツが意図した箇所に接続されているか確認してください
- パーツ同士は干渉していないか確認してください
|
スワッシュプレートの構造例
下項に代表的なビシージでの製作例をご紹介いたします。それぞれにメリット/デメリットと特徴がありますので作成時のヒントにしてください。
ピストンブロック式
- 前後又は左右のピストンを互いに逆方向へ伸縮させることでスワッシュプレートを傾け、サイクリックコントロールを行います
- 全てのピストンを同じ方向へ伸縮させることでコレクティブコントロールも可能になっています
- サイクリックとコレクティブを同じピストンで制御するため、それらを同時に操作すると効きが弱まる
- サイクリックに比べてコレクティブの効きが強くなりがちなので、前後又は左右のピストンだけでコレクティブを制御する手もあります
- ピストンの伸縮する力はあまり強くないので、高負荷時には操作の効きが悪くなる場合があります
- 可動量を直接設定できないため、場合によっては他ブロック等で物理的に可動域を制限してやる必要があります
- 傾きの大きさを直接設定できないため、操作の効き方の調整が難しい。
imageプラグインエラー : 画像を取得できませんでした。しばらく時間を置いてから再度お試しください。
ピストンブロック+ウィンチ式
- ピストンブロック式にウィンチを追加してコレクティブコントロールの微調整を可能にしたもので、基本的にはピストンブロック式と同じです
- 前後又は左右を逆方向へ動かすことでトリム調整にも使えます
- ウィンチを操作するとピストンの可動域が狭まる場合があるので、構造次第では操作性が悪化します
- ウィンチのロープが高負荷時に切れることがあるので、高性能化は難しいです
imageプラグインエラー : 画像を取得できませんでした。しばらく時間を置いてから再度お試しください。
ステアヒンジ製ピストン式
- ステアヒンジ2つとボールジョイントによってピストン構造を作り、ピストンブロック式と同様に機能させるもので、上側のステアヒンジの回転速度と動作角度は、下側のステアヒンジの2倍にするといいです
- 可動量を設定できて、好みによって自動戻りをオフにもできます
- ピストンブロック式に比べて剛性が高く、操作する力も強いため高性能化が可能です
- サイクリックとコレクティブの同時操作で効きが弱まる点や、傾きを直接設定できない点はピストンブロック式と同じ
- 稼動部品が多いため、見ていて楽しい(※個人の感想です)
imageプラグインエラー : 画像を取得できませんでした。しばらく時間を置いてから再度お試しください。
ステアヒンジ直接傾斜式
- ステアヒンジの傾きによってそのままスワッシュプレートを傾けサイクリックコントロールを行うタイプです
- それだけではコレクティブコントロールができないので、ピストン構造等の併用が必要です
- サイクリック制御部とコレクティブ制御部が別になっているため、それらの同時操作でも効きが弱くなりにくい
- 傾きの大きさを直接設定できるため調整が容易
- ピストン部を含めると細長い構造になりがちで、ピストン式に比べて剛性が低い傾向がある
- ピストン式よりも可動部が大きいため、クリアランスも大きめにとる必要がある
imageプラグインエラー : 画像を取得できませんでした。しばらく時間を置いてから再度お試しください。
ステアヒンジ直接傾斜ピストン併用式
- ピッチ又はロールのどちらかの制御のみステアヒンジ直接傾斜式で、もう一方をコレクティブと兼用のピストン構造で制御するタイプです
- ステアヒンジ直接傾斜式を簡略化したもので、小型化・省パーツ化できます
- ピストン構造が離れていることで、それによるサイクリックコントロールが効きにくくなりがちで、さらにコレクティブと兼用のため、それらの同時操作ではさらに効きが弱くなります
※画像の薄緑のステアヒンジはただの繋ぎの部品で、動作はしません
imageプラグインエラー : 画像を取得できませんでした。しばらく時間を置いてから再度お試しください。
ピストンブロックスライド式
- スワッシュプレートを2つのボールジョイントで上下から挟み、その片方を前後左右に動かすことでスワッシュプレートを傾け、サイクリックコントロールをするタイプです
- それだけではコレクティブコントロールができないので、ピストン構造等の併用が必要です
画像では2つのボールジョイントの上下にコレクティブ用のピストンブロックを付けています
- 薄緑のアーマープレートでピストンブロックの可動域を制限して調整しています
- 上下方向に大きくなりがちで、構造によっては剛性が低くななります(画像のは剛性がかなり低い)
imageプラグインエラー : 画像を取得できませんでした。しばらく時間を置いてから再度お試しください。
ローターブレードの構成例
シングルローターを作成する場合の選択肢として全間接型、無関節型、半関節型がある。それぞれに長所・短所があり
*
*
無関節型ローター(この項目は暫定的にnoyが書いています)
|
+
|
... |
- 全関節型ローターのようなフラッピングヒンジとリードラグヒンジを持たないローターの形式を無関節型ローター、又はリジッドローターと呼びます(無関節と言いつつフェザリングヒンジはあります、フェザリングヒンジも無いものはベアリングレスローターと呼びます)
- 全関節型に比べて構造が単純で部品点数が少なくでき、操作に対するレスポンスが良く機動力が高い傾向があります
- 現実での無関節型ローターは、ローターブレードの付け根に柔軟性のある素材を使うことで全関節型ローターと同じようにフラッピングやドラッギングできるようにしてあり、揚力の不均衡に対処できるようになっています
- しかしBesiegeにはそのようなブロックは無いため(工夫次第で似たようなことができる可能性はありますが)安定して飛行するには別の方法で揚力の不均衡に対処しなくてはいけません
ということで現状で有効と思われる方法を以下に紹介していきますが、ほぼ個人的な研究で考え出したものになるので実用例が少なく、必ずしも効果があるわけではなかったり、仕組みについても思い違いをしている可能性があることをご了承ください
以下の解説は全て、上から見て時計回りのローターで、ジャイロスコピックプリセッションの影響が回転方向へ45度進んだ位置に表れる機体
を例にしています(反時計回りのローターでは左右が逆になります)
なお、現在考えられる無関節型ローターでの揚力の不均衡対策は、全関節型やシーソー型ほどの効果が得られない場合が多いため、基本的に前進中は機首下げ操作を入力し続け、サイクリックコントロールによって左右の揚力差を小さくすることも必要になります
前進中にさらに機首を下げるには、揚力を減らす必要があったりと、全関節型や半関節型に比べて操作しにくいかもしれません
①ブレードに上反角を付ける
- ブレードに上反角を付けると、前進によってローターの前側では上向きの空気抵抗が発生して揚力が増加し、後ろ側では下向きの空気抵抗が発生するので揚力が減少します
- それがジャイロスコピックプリセッションによって機体を左後ろへ傾ける効果となるため、多少ながらロール軽減効果があります
- 欠点は、同時に機首上げが強くなってしまうことと、左右の揚力差を無くすわけではないので効果が弱いことです
- 上反角を付ける際はフェザリングヒンジを含めるようにします(含めないとブレードピッチを大きくしたときに上反角が小さくなってしまう)
②ブレードに後退角を付ける
- ブレードに後退角を付けると、揚力が大きくなってブレードが上へ引っ張られたときにブレードピッチが小さくなるようにブレードが捻られ、揚力が増え過ぎることを防いでくれるため、高速時の左右の揚力差を小さくできます
- 欠点は揚力が増えにくくなる可能性がある点で、それにより最高速度も伸びにくい可能性があります
- 後退角を付けるとサイクリックコントロールの反応方向も変わってしまうので、その再調整が必要になります
- フェザリングヒンジを含めず後退角を付けたり、ブレードの外周側のみに後退角を付けたほうがこの効果は高くなりますが、その場合はブレードピッチを大きくしたときに下反角が付いてしまうので、同時にある程度の上反角も付けておくと良いと思います
①②において、フェザリングヒンジを含めずに上反角を付けると、ブレードピッチを大きくしたときに上反角が小さくなる反面、後退角が大きくなってサイクリックの反応方向がロール軽減方向へ少しだけシフトする効果が得られます
③ブレードに固定のタブを付ける
- ブレードにタブを付け、タブが受ける空力効果によってブレードを捻って揚力を補正します
- 具体的には、メインのブレードとは逆に下方向の揚力を発生する向きで設置したプロペラに90度の後退角を付け、さらに先端が下へ下がるように角度を付けます
- ブレードがローターの前側にある時、タブは前進によって下方向へ引っ張られるので、ブレードが捻られてブレードピッチが大きくなって前側の揚力が増加します
- 逆にブレードがローターの後ろ側にある時、タブは前進によって上方向へ引っ張られるので、ブレードピッチが小さくなって後ろ側の揚力は減少します
- タブによる揚力の変化には若干のタイムラグがあるのか、実際は少し回転方向へズレるようで、ジャイロスコピックプリセッションの影響と合わさり、この前後の補正では主にロールの軽減効果が得られます
- さらにはブレードがローターの左側にある時、タブは前進によって上方向へ引っ張られるので、ブレードピッチが小さくなって左側の揚力は減少します
- 逆にブレードがローターの右側にある時、タブは前進によって下方向へ引っ張られるので、ブレードピッチが大きくなって右側の揚力は増加します
- こちらも実際は左右よりも少し遅れた位置の揚力が変化するので、左右の補正では主に機首上げの軽減効果が得られます
- タブを長くしたり、ローターの外周寄りに付けることで補正効果が高められます
- 非常に高い効果があり、揚力の不均衡の軽減どころか逆の効果を発生させることもできます
- ロールの軽減と機首上げの軽減が(完全にではないものの)個別に調整できる点もメリットになります
- 欠点は、タブによって全体の揚力が減少することと、効果を強めると反応が鈍くなって操作性が悪化する可能性があることです
②③共に、ブレードを長くしたほうが捻じれやすくなるので揚力の補正効果が高まります
|
テクニック
テクニックというより、知っていればヘリコプター作成に便利なヒント集になります。
|
+
|
... |
スワッシュプレートにたよらないコレクティブコントロール
コレクティブコントロールは一様にブレードの迎え角を操作します。従って、ビシージで作るならスワッシュプレートを介さずに「ステアリングヒンジ」や「ステアリング」を直接ブレードに取り付けることで構造を簡易にすることが出来ます。また、リンクロッドの長さを「ステアリングヒンジ」等で伸び縮みさせる機構でもコレクティブコントロールは出来るので、「スワッシュプレートを上下させる」機能が複雑化と重量増加を招いてしまうなら、このような代替機構にしてしまうのも手です。
接続判定
スワッシュプレートを小型化しようとすると、接続判定とそれに伴う設置順序への理解が必要になってきます。
例えば「スイベル」と「ボールジョイント」を互いに根元接続で向かい合わせで0.5づつ埋め込んでみて下さい。
シミュレートするとどちらかの効果が発揮されているはずです。
次に片方を一度消去して、「元に戻す」で再度設置して、シミュレートしてみてください。
その効果が逆転しているはずです。
このようにビシージでは設置する順番によって効果が異なる仕様です。
この仕様をうまく利用することで小型化や効率化が可能になりますので、テクニックとして覚えておきましょう。
伸ばしスライダー
「ピストン」は設置後にFキーを押すことで伸びた状態にすることが可能です。
しかし「スライダー」にはそんな機能は存在しません。
痒い所に手が届かない仕様ですが、バグを利用した次の手順で伸ばした状態で設置することが可能になります。
- スライダーを通常通り設置する。
- スライダーを選択してFキーを押す。
- スライダーを消去する。
- 「元に戻す」
コライダーMODを使用しないと見た目変わらないので判りづらいですが、これで伸ばした状態での設置が可能となります。
注意点としてマシン(ボックス)を回転させると頭接続が付かなくなります。
シングルローター作成時のダンパーなどに使えるので覚えておくと大変便利です。
重心位置が中心にないパーツ
ビシージのパーツの多くは見た目通りの重心位置にありますが、異なるものもあります。テールローターを作る際などモーメントバランスを考える必要があるとき、以下の数値を参考にしてください。
いずれの値も根元からの距離になります。
| パーツ名 |
重心位置 |
重量 |
備考 |
| ステアリングヒンジ |
0.854 |
1.0 |
初期微動なしでの値 |
| ステアリング |
0.598 |
1.0 |
|
| ヒンジ |
0.820 |
0.5 |
|
| ボールジョイント |
0.820 |
0.5 |
|
| スイベル |
0.623 |
0.5 |
|
| スピニングブロック |
0.530 |
1.0 |
|
| 丸ノコ |
0.423 |
1.0 |
正確には0.4229と0.4230との間 |
| ホイール |
0.189 |
1.0 |
動力・無動力共通 |
| 大ホイール |
0.462 |
1.0 |
動力・無動力共通 |
| コグ(歯車) |
0.563 |
0.5 |
動力・無動力・大コグ共通 |
その他のサイクリックコントロール
このページではスワッシュプレートを用いた方式を述べて参りましたが、サイクリックコントロールを行う方法は他にもありますので参考までにご紹介いたします。
スライド式
スワッシュプレートがアウターリングの傾斜による差異をブレードの迎え角に伝えるのに対して、水平方向の差異を迎え角に伝える方式がスライド式です。
現実のスワッシュプレートが発達する以前のオートジャイロで使用されていた方式で簡易的にサイクリックコントロールが可能です。
センサー式
オートメーションパーツの「センサー」を使用したサイクリックコントロールです。センサーとそれに反応させる「ピストン」等の反応板、ブレードの迎え角を制御する「ステアリングヒンジ」を用いた方式です。
リンクロッドが不要で物理的にブレードと接触しないので振動が小さかったり、レイアウトが自由にできたりと利点はあるものの高出力エンジンに対して反応が鈍いという弱点がある。
|
終わりに
ビシージで空を飛ぼうと思ったとき、真っ先に飛行機とヘリコプター、気球が候補に挙がるかと思います。そのうち飛行機は、先駆者の諸先輩方がおられ、空力制御の理論も成熟しています。それに対してヘリコプターは登場以来、反トルク制御が長らくスタンダードだった気がします。
その後、スワッシュプレートの再現による空力制御が試みられるようになり、
ステアリングヒンジの自動戻り機能の追加、接続判定の理論化により、構造の小型化が可能になりました。さらに、スワッシュプレート以外のサイクリック
制御機構、全関節型のローターが開発されるようになり、空力制御のシングルローター機が現在は主に作られるようになっています。
今回、これまでの知見をこの記事として言語化し、広く共有することになりました。ここに記載してある知識を貴方の糧として頂き、ヘリコプターを作成してさらなる見識を深め、この分野を発展させていただけたのなら望外の喜びです。
よって追記、修正および訂正は大歓迎です。貴方の経験と知識をぜひ皆にご教授して下さい。
最後になりましたが、この記事の作成に協力いただきましたnoy様、執筆の機会を頂きましたYamabach様、各種理論・機構・情報をまとめ上げられた先駆者の諸先輩方に感謝を捧げ、筆を置きたいと思います。
記:MIGAKI 2022/01
参考動画
最終更新:2024年04月24日 15:19











